Questões de Concurso Sobre engenharia de automação
Foram encontradas 350 questões
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262973
Engenharia de Automação
Um controlador autoprogramável (CLP) é um computador desenvolvido para desempenhar funções de controle de diversos níveis de complexidade.
Os CLP apresentam diversas características. NÃO é uma dessas características:
Os CLP apresentam diversas características. NÃO é uma dessas características:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262972
Engenharia de Automação
Um projeto de automação desenvolvido para uma empresa em fase de crescimento necessitou instalar conversores DC-DC conforme a figura abaixo, que, nesse caso, é denominada “boost converter”.
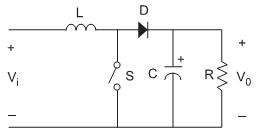
A função do indutor L nesses conversores é:
A função do indutor L nesses conversores é:
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262952
Engenharia de Automação
Um projeto de automação utiliza um sistema hidráulico que opera com resfriamento de água. A água circula através de uma bomba que a retira de um poço, à razão de 7,5 litros por segundo. O engenheiro identificou que o poço possui 10 metros de profundidade e que o rendimento da bomba é de 80%.
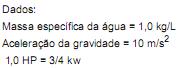
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262951
Engenharia de Automação
Considere as afirmativas abaixo que se referem às dificuldades que o uso de ondas de rádio em alta frequência, como alternativa aos cabos coaxiais ou fibras óticas, apresentam no processo de transmissão de dados entre redes de computadores conectados aos sistemas de automação.
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262949
Engenharia de Automação
A análise de sistemas de controle de automação envolve conhecimentos sobre o funcionamento de seus componentes eletrônicos. A esse respeito são feitas as afirmativas:
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
I – Ao se aplicar um pulso positivo à porta (gate) de um SCR, este continua conduzindo, mesmo que o sinal de disparo seja retirado, e assim permanece enquanto houver uma corrente mínima circulando entre anodo e catodo, chamada corrente de manutenção.
II – O IGBT é um componente eletrônico cujo controle de condução entre o coletor e o emissor é feito por tensão ao invés de corrente.
III – Um TRIAC é um elemento bidirecional, ou seja, pode conduzir nos dois semiciclos de uma senoide.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262944
Engenharia de Automação
Um sistema dinâmico, utilizado para controle de uma rede automatizada, forneceu dados processados ao longo do tempo e que permitiram a construção do quadro abaixo.
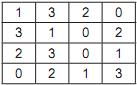
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
A partir dos dados assinalados, mantendo-se a mesma disposição, construiu-se uma matriz M.
O valor do determinante associado à matriz M é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262941
Engenharia de Automação
A maioria das empresas procura, atualmente, otimizar a conectividade de suas redes através da automação baseada em soluções da tecnologia da informação. Já é comum a interligação de controladores e de outros dispositivos com tendência aos barramentos de campo, que serão gradualmente integrados a outros sistemas de automação.
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262940
Engenharia de Automação
Atualmente, muitos sistemas têm sido desenvolvidos na parte física do processo de automação industrial, destacando-se a transmissão de informação para controle das operações. As redes fazem a comunicação entre diferentes setores com o objetivo de trocar informações.
As chamadas redes de chão de fábrica
As chamadas redes de chão de fábrica
Q262804
Engenharia de Automação
Para simplificar o problema de transmissão de dados, as redes de computadores são estruturadas em camadas, as quais se encarregam de funções específicas.
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192353
Engenharia de Automação
A equação recursiva a seguir gera a sequência causal y(n).
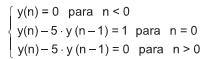
A expressão de y(n) para n ≥ 0 é
A expressão de y(n) para n ≥ 0 é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192352
Engenharia de Automação
O modelo em função de transferência de um sistema linear contínuo é dado por
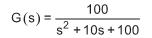
Para esse sistema, foi obtido um modelo equivalente discreto, com zero order hold, usando um período de amostragem de 10 ms. Considere que, para uma entrada degrau unitário, o tempo de acomodação (settling time) da resposta é calculado por , onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo.
, onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo.
Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, aproximadamente, quantas amostras levará o sistema discreto para atingir o estado estacionário, partindo do instante inicial?
Para esse sistema, foi obtido um modelo equivalente discreto, com zero order hold, usando um período de amostragem de 10 ms. Considere que, para uma entrada degrau unitário, o tempo de acomodação (settling time) da resposta é calculado por
, onde ς é a razão de amortecimento, e ωn é a frequência natural não amortecida do sistema contínuo. Supondo que o sistema discretizado tenha o mesmo desempenho que o sistema contínuo, aproximadamente, quantas amostras levará o sistema discreto para atingir o estado estacionário, partindo do instante inicial?
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192351
Engenharia de Automação
Um sistema discreto tem como entrada r(n) e saída y(n), que se relacionam pelas equações de diferenças
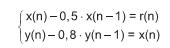
A função de Transferência do sistema
A função de Transferência do sistema
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192350
Engenharia de Automação
O polinômio do denominador da função de transferência de um sistema em malha fechada é dado por
s3 + 9s2 + 23s + 15 + K
Variando K positivamente a partir de K = 0, o valor de K a partir do qual o sistema vai para a instabilidade é
s3 + 9s2 + 23s + 15 + K
Variando K positivamente a partir de K = 0, o valor de K a partir do qual o sistema vai para a instabilidade é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192349
Engenharia de Automação
Texto associado
Considere o enunciado para responder a questão a seguir.

O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
 e K é uma constante positiva.
e K é uma constante positiva.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
e K é uma constante positiva.
O valor de K que garante os polos em malha fechada posicionados em -10, (-2,5 + j2,5√5) e (-2,5 - j2,5√5) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192348
Engenharia de Automação
Texto associado
Considere o enunciado para responder a questão a seguir.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que e K é uma constante positiva.
O diagrama em blocos da figura acima mostra uma confi-
guração em malha fechada. Sabe-se que
e K é uma constante positiva.
A Função de Transferência que relaciona Y(s) com R(s) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192347
Engenharia de Automação
Costuma-se aproximar a variável complexa z, usada em sistemas discretos (digitais), pela variável também complexa w para sistemas contínuos, através da relação de transformação  onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.
Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
onde T (real positivo) é o período de amostragem usado na discretização do sinal contínuo.Sabe-se que a região de estabilidade para sistemas contínuos é o SPE, ou seja, o Semiplano da Esquerda do plano complexo da variável w, que pode ser definida por Re[w] < 0.
O lugar geométrico, no plano da variável z, dos pontos em que Re[w] < 0, é a região interior ao círculo de raio igual a (A) 1 e centro na origem
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192346
Engenharia de Automação
A famosa sequência de Fibonacci pode ser definida como o sinal x(n), discreto, causal e infinito, cujas primeiras amostras são

A sua lei de formação para pode ser expressa como
pode ser expressa como 
Aplicando a Transformada Z no sinal x(n), resulta a expressão
A sua lei de formação para
pode ser expressa como Aplicando a Transformada Z no sinal x(n), resulta a expressão
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192344
Engenharia de Automação
Um sistema linear é representado em Espaço de Estados pelas equações:

Os polos desse sistema são
Os polos desse sistema são
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192343
Engenharia de Automação
Considere que x(t) é um sinal que evolui no domínio do tempo de acordo com a equação diferencial linear representada por 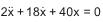 , onde
, onde 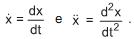 . Considerando
. Considerando  e , a solução dessa equação, válida unicamente para t > 0, é expressa por
e , a solução dessa equação, válida unicamente para t > 0, é expressa por
, onde . Considerando e , a solução dessa equação, válida unicamente para t > 0, é expressa por
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192342
Engenharia de Automação
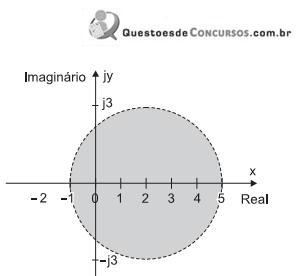
Considere z uma variável complexa que se apresenta decomposta na forma z = x + jy, x e y números reais. O gráfico acima mostra o plano complexo e a figura de um círculo centrado em z = 2 e de raio igual a 3.
O lugar geométrico da região sombreada, não incluindo a borda (circunferência), é expresso por