Questões de Concurso Sobre engenharia de automação
Foram encontradas 350 questões
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267632
Engenharia de Automação
Um sistema de medição pode ser dividido funcionalmente em etapas, sendo que as três primeiras são denominadas de sensoriamento, condicionamento de sinal e processamento de sinal. A esse respeito, assinale a opção correta.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267631
Engenharia de Automação
Um sinal contínuo no tempo, com espectro de frequências limitado, ao ser amostrado a uma taxa constante gera um sinal discreto no tempo. O sinal discreto no tempo possui como característica o fato de
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267630
Engenharia de Automação
Para conversão analógica-digital em sistemas de controle digital e processamento digital de sinais, utiliza-se um procedimento de retenção de ordem zero (zero-order-hold). Nesse procedimento, o sinal
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267629
Engenharia de Automação
Em sistemas de controle liga-desliga (on-off), que, por natureza, são não lineares, admite-se uma variação da variável de saída do sistema em torno do valor de referência estipulado (setpoint). O chaveamento do sinal de controle apresenta uma histerese com largura definida. Se a largura de histerese do controlador diminui,
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267628
Engenharia de Automação
Em sistema de controle em malha fechada com realimentação não unitária, o método do lugar geométrico das raízes, que permite mostrar a disposição dos polos em malha fechada em termos de algum parâmetro do sistema, é obtido a partir da
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267627
Engenharia de Automação
A resposta em frequência de sistemas lineares está relacionada ao desempenho dinâmico destes, tanto em termos de resposta transitória quanto em termos de resposta em regime permanente. Um sistema com maior largura de banda apresenta
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267626
Engenharia de Automação
Um sistema linear cuja função de transferência seja dada por 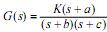 , em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
, em que K, a, b e c são números reais, será estável se
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267625
Engenharia de Automação
O controlador lógico programável (CLP) é utilizado nas plantas industriais para automatizar processos, por meio de um adequado sequenciamento das etapas associadas. O dispositivo é composto, basicamente, por unidades de entrada (digitais e analógicas), unidade de processamento e unidades de saída (digitais e analógicas), além de, possivelmente, outras unidades específicas. Um circuito que pode fazer parte do CLP é o WDT (watch dog timer), cuja função é monitorar
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267624
Engenharia de Automação
Em sistemas dinâmicos lineares e contínuos, a resposta ao impulso, também denominada função de ponderação, corresponde a uma forma de representação do sistema no domínio do tempo. Conhecendo-se a resposta impulsiva, a resposta do sistema a outros tipos de excitação pode ser corretamente obtida
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Equipamento Júnior - Mecânica - Biocombustível |
Q187542
Engenharia de Automação
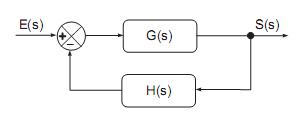
O controle de um processo é representado pelo diagrama de blocos acima, onde E(s) é a entrada, S(s) é a saída, G(s) é a função de transferência do processo a ser controlado e H(s) é a função de transferência do controlador. Considerando-se uma realimentação unitária, a função de transferência do sistema com o controlador, FT = S(s)/E(s), é expressa por
Ano: 2010
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2010 - Petrobras - Engenheiro de Produção - Biocombustível |
Q187341
Engenharia de Automação
A utilização da tecnologia de identificação através da aplicação do código de barras impresso nos produtos, considerada uma das mais avançadas ferramentas na automação dos processos, trouxe diversos benefícios para a área industrial, EXCETO
Q1229380
Engenharia de Automação
Os sistemas instrumentados de segurança são fundamentais para a garantia operacional da unidade, da vida humana e dos equipamentos envolvidos. A esse respeito, analise as afirmativas a seguir.
I - Sistemas automáticos com votação 1 de 2 são configurados para que, no caso de um dos dois instrumentos estar funcionado a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
II - Sistemas automáticos com votação 2 de 2 são configurados para que, no caso um dos dois instrumentos estar funcionando a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
III - Uma utilização para o conceito de falha segura é quando o canal de entrada de um Controlador Lógico Programável (CLP) opera normalmente energizado, sendo que, em caso de falha do equipamento de campo ou caso haja o rompimento dos fios, o alarme e o intertravamento da lógica de controle atuam.
IV - Uma válvula normalmente aberta, instalada na saída de um tanque com gás pressurizado, está configurada para operar fechada, abrindo somente quando for solicitado, sendo que, em caso de shutdown, a alimentação elétrica desta válvula será desligada e, por questões de segurança, permanecerá fechada.
São corretas APENAS as afirmativas
I - Sistemas automáticos com votação 1 de 2 são configurados para que, no caso de um dos dois instrumentos estar funcionado a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
II - Sistemas automáticos com votação 2 de 2 são configurados para que, no caso um dos dois instrumentos estar funcionando a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
III - Uma utilização para o conceito de falha segura é quando o canal de entrada de um Controlador Lógico Programável (CLP) opera normalmente energizado, sendo que, em caso de falha do equipamento de campo ou caso haja o rompimento dos fios, o alarme e o intertravamento da lógica de controle atuam.
IV - Uma válvula normalmente aberta, instalada na saída de um tanque com gás pressurizado, está configurada para operar fechada, abrindo somente quando for solicitado, sendo que, em caso de shutdown, a alimentação elétrica desta válvula será desligada e, por questões de segurança, permanecerá fechada.
São corretas APENAS as afirmativas
Q1187990
Engenharia de Automação
Tratando-se de redes industriais, o protocolo Profibus (Process Field Bus) apresenta algumas características, dentre as citadas a seguir.
I - Utiliza três camadas do modelo OSI: física, enlace de dados e aplicação.
II - É um protocolo que só permite um mestre na rede.
III - A passagem do bastão (Token Passing) é somente realizada quando um dispositivo escravo deseja realizar uma pergunta ou comando.
IV - O Profibus DP é utilizado em nível de célula, enquanto o Profibus FMS é utilizado em nível de dispositivo.
V - O Profibus PA (Process Automation) permite a utilização de barramento comum em áreas de segurança intrínseca, diminuindo os custos com equipamentos e instalação.
É(São) correta(s) APENAS a(s) característica(s)
I - Utiliza três camadas do modelo OSI: física, enlace de dados e aplicação.
II - É um protocolo que só permite um mestre na rede.
III - A passagem do bastão (Token Passing) é somente realizada quando um dispositivo escravo deseja realizar uma pergunta ou comando.
IV - O Profibus DP é utilizado em nível de célula, enquanto o Profibus FMS é utilizado em nível de dispositivo.
V - O Profibus PA (Process Automation) permite a utilização de barramento comum em áreas de segurança intrínseca, diminuindo os custos com equipamentos e instalação.
É(São) correta(s) APENAS a(s) característica(s)
Ano: 2008
Banca:
CESGRANRIO
Órgão:
ANP
Prova:
CESGRANRIO - 2008 - ANP - Técnico em Regulação - Instrumentação |
Q2916805
Engenharia de Automação
As chaves de nível tipo Tandem caracterizam-se por possuir
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113270
Engenharia de Automação

No circuito mostrado na figura acima, os diodos são considerados ideais e a tensão  aplicada é senoidal. Considerando a disposição dos componentes no circuito e suas po- laridades, a saída
aplicada é senoidal. Considerando a disposição dos componentes no circuito e suas po- laridades, a saída  será uma tensão
será uma tensão
aplicada é senoidal. Considerando a disposição dos componentes no circuito e suas po- laridades, a saída será uma tensão
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113269
Engenharia de Automação

Foi desenvolvido um programa em LADDER para controle do sistema, mostrado parcialmente na Figura 2. A linha que completa corretamente o programa da Figura 2 é
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113268
Engenharia de Automação

Numa comunicação escravo-escravo, ilustrada na Figura 2, o CLP E1 recebe um estímulo na entrada correspondente ao ponto X11, que atualiza o ponto C01 do CLP M e que, conseqüentemente, provoca uma modificação no ponto C21 do CLP E2. Considere que os tempos de varredura dos CLPs M, E1 e E2 sejam todos de 50ms, que o tempo requerido para completar a transmissão na rede seja de 20ms, e desconsidere o tempo necessário para a percepção de um estímulo na entrada de um CLP. O tempo mínimo, em milissegundos, em que um sinal conectado à entrada correspondente ao ponto X11 deve permanecer num determinado estado para que este seja percebido no ponto C21 é
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113267
Engenharia de Automação
Um sistema dinâmico em malha fechada pode ser modelado sob a forma de espaço de estado através das seguintes equações:
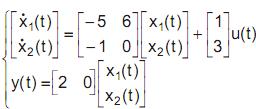
As posições dos pólos no plano s da função de transferência deste sistema são
As posições dos pólos no plano s da função de transferência deste sistema são
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113266
Engenharia de Automação
Um determinado sistema físico pode ser modelado através da seguinte equação diferencial ordinária:

onde u(t) e y(t) representam, respectivamente, os sinais de entrada e de saída do sistema. A função de transferência G(s) = deste sistema é
deste sistema é
onde u(t) e y(t) representam, respectivamente, os sinais de entrada e de saída do sistema. A função de transferência G(s) =
deste sistema é
Ano: 2008
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2008 - Transpetro - Engenheiro Júnior - Automação |
Q113265
Engenharia de Automação
Sobre os modelos de referência OSI e TCP/IP, NÃO é correto afirmar que