Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 192 questões
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobras - Técnico de Manutenção Júnior - Eletrônica |
Q182393
Engenharia Eletrônica
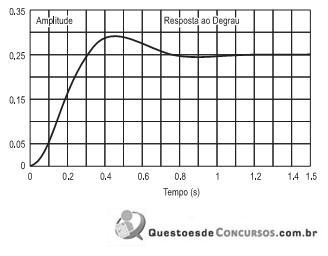
O gráfico da figura acima corresponde à resposta ao degrau unitário de um sistema de 2ª ordem, cuja função de transferência é
 . Com base nos dados da figura, o valor da Frequência Natural Não Amortecida é
. Com base nos dados da figura, o valor da Frequência Natural Não Amortecida é
Q181881
Engenharia Eletrônica
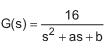
Considere o sinal:
A série de Fourier desse sinal é caracterizada por:
A série de Fourier desse sinal é caracterizada por:
Q181875
Engenharia Eletrônica
No sistema de modulação PCM, é responsável por converter para níveis discretos a amplitude das amostras do sinal modulante, impondo a elas um erro limitado. Trata-se de
Q181869
Engenharia Eletrônica
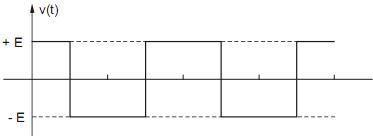
Considere o sinal abaixo:
A tensão média vale:
A tensão média vale:
Ano: 2011
Banca:
FCC
Órgão:
TRT - 23ª REGIÃO (MT)
Prova:
FCC - 2011 - TRT - 23ª REGIÃO (MT) - Analista Judiciário - Engenharia Elétrica |
Q180900
Engenharia Eletrônica

O sinal de entrada de um sistema de controle está mostrado acima. A sua transformada de Laplace é dada por
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180136
Engenharia Eletrônica
Um sistema com sinais x(t) de entrada e y(t) de saída tem sua dinâmica modelada pela seguinte equação diferencial:

A função de transferência que liga a saída Y(s) à entrada X(s) é
A função de transferência que liga a saída Y(s) à entrada X(s) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180135
Engenharia Eletrônica
Considere o sinal causal dado por v(t) = 10e-2t - 5e-5t para t > 0 e nulo para t < 0. A transformada de Laplace de v(t) é
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
Correios
Prova:
CESPE - 2011 - Correios - Analista de Correios - Engenheiro - Engenharia Eletrônica |
Q132651
Engenharia Eletrônica
Texto associado

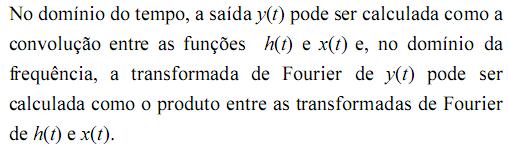
Considerando a figura acima, que ilustra um sistema linear e
invariante no tempo, com resposta ao impulso h(t), entrada x(t) e
saída y(t), julgue os itens a seguir.
Considerando a figura acima, que ilustra um sistema linear e
invariante no tempo, com resposta ao impulso h(t), entrada x(t) e
saída y(t), julgue os itens a seguir.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
Correios
Prova:
CESPE - 2011 - Correios - Analista de Correios - Engenheiro - Engenharia Eletrônica |
Q132650
Engenharia Eletrônica
Texto associado
Considerando a figura acima, que ilustra um sistema linear e
invariante no tempo, com resposta ao impulso h(t), entrada x(t) e
saída y(t), julgue os itens a seguir.
Considerando a figura acima, que ilustra um sistema linear e
invariante no tempo, com resposta ao impulso h(t), entrada x(t) e
saída y(t), julgue os itens a seguir.

Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
FUB
Prova:
CESPE - 2011 - FUB - Técnico de Laboratório - Física - Específicos |
Q108168
Engenharia Eletrônica
Texto associado
Acerca de conceitos básicos de eletrônica analógica, sinais e
eletrônica digital, julgue os próximos itens.
eletrônica digital, julgue os próximos itens.
Considere duas formas de onda senoidais retificadas: uma em meia onda  e outra em onda completa
e outra em onda completa  Nessas condições, o valor médio de S1 será igual à metade do valor médio de
Nessas condições, o valor médio de S1 será igual à metade do valor médio de  ainda que os valores RMS das duas formas de onda sejam iguais.
ainda que os valores RMS das duas formas de onda sejam iguais.
e outra em onda completa Nessas condições, o valor médio de S1 será igual à metade do valor médio de ainda que os valores RMS das duas formas de onda sejam iguais.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107789
Engenharia Eletrônica
Texto associado
Em processamento digital de sinais, sinais analógicos são
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
O filtro anti-aliasing utilizado para condicionar o sinal analógico a ser digitalizado deve ser do tipo passa-altas.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107788
Engenharia Eletrônica
Texto associado
Em processamento digital de sinais, sinais analógicos são
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
Após a amostragem de um sinal analógico não periódico, o sinal amostrado resultante terá espectro de frequência periódico e definido apenas para valores discretos de frequência.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107786
Engenharia Eletrônica
Texto associado
Em processamento digital de sinais, sinais analógicos são
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
Sinais digitais são definidos em um espaço amplitude-tempo em que o tempo é discreto e a amplitude é contínua.
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Elétrica |
Q573198
Engenharia Eletrônica
Texto associado
Um sistema linear é modelado pelas seguintes equações

em que as constantes  e as variáveis físicas
e as variáveis físicas  .
.
A entrada do sistema é u(t) e a saída medida é y(t).
A função de transferência  desse sistema é:
desse sistema é:
desse sistema é:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569038
Engenharia Eletrônica
Texto associado
Para uma representação discreta (ou a tempo discreto) no espaço de estados, um sistema linear S1 é definido por x(1+ k ) = Ax(k) + Bu(k) e y(k) = Cx(k) + Du(k) , em que: o vetor de estado x∈ ; o vetor de saída y∈
; o vetor de saída y∈ ; o vetor de entrada u∈
; o vetor de entrada u∈ ; k ∈
; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
(incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.
Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈ n×n | ∃T−1 , define-se o sistema S2.
n×n | ∃T−1 , define-se o sistema S2.
; o vetor de saída y∈ ; o vetor de entrada u∈; k ∈ (incremento discreto); as matrizes são invariantes no tempo, têm dimensões compatíveis com os vetores e são formadas por números reais.Por meio de uma transformada de similaridade de S1, obtida utilizando uma matriz T∈
n×n | ∃T−1 , define-se o sistema S2.
Empregando as denominações de matriz de dinâmica (A ), matriz de entradas (B ), matriz de saída (C) e matriz de transmissão direta (D), para T ≠ I (a matriz de transformação não é a matriz identidade), ao se comparar as propriedades, as matrizes e os vetores dos dois sistemas, verifica-se que:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569034
Engenharia Eletrônica
Texto associado
Para representações em espaço de estado algumas propriedades são importantes e definem as possibilidades de manipulação de uma planta física. A controlabilidade e a observabilidade de um sistema são duas das propriedades fundamentais para a síntese de controladores.
Para o sistema linear contínuo (t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes:
(t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes:
A = ; B =
; B =  ; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈
; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈ .
.
Para o sistema linear contínuo
(t ) = Ax(t) + Bu(t) e y(t) = Cx(t) + Du(t) , definido pelas matrizes: A =
; B = ; C = [ f g]; D = 0 ; e {a,b, c, d, f , g}∈.
Assinale a afirmativa correta:
Ano: 2010
Banca:
FGV
Órgão:
FIOCRUZ
Prova:
FGV - 2010 - FIOCRUZ - Tecnologista em Saúde - Engenharia Eletrônica |
Q569022
Engenharia Eletrônica
Para o sistema discreto definido por x(1+ k ) = Ax(k) + Bu(k) e y(k) = Cx(k) + Du(k) , cujas matrizes são: a matriz dinâmica  , a matriz de entrada
, a matriz de entrada  ; C = [−1 2] e a matriz de transmissão direta é nula.
; C = [−1 2] e a matriz de transmissão direta é nula.
O ganho de realimentação de estados K que resulta num sistema discreto estável é dado pela alternativa:
, a matriz de entrada ; C = [−1 2] e a matriz de transmissão direta é nula.O ganho de realimentação de estados K que resulta num sistema discreto estável é dado pela alternativa:
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista em Metrologia e Qualidade - Informática Aplicada à Metrologia Legal |
Q449571
Engenharia Eletrônica
Considere um sistema de primeira ordem que tenha a seguinte resposta ao impulso unitário:  em que t é a variável independente tempo contínuo, t, a constante de tempo do sistema, e e, o número neperiano (e = 2,71). A respeito dessa resposta ao impulso, é correto afirmar que y(t) terá amplitude
em que t é a variável independente tempo contínuo, t, a constante de tempo do sistema, e e, o número neperiano (e = 2,71). A respeito dessa resposta ao impulso, é correto afirmar que y(t) terá amplitude
em que t é a variável independente tempo contínuo, t, a constante de tempo do sistema, e e, o número neperiano (e = 2,71). A respeito dessa resposta ao impulso, é correto afirmar que y(t) terá amplitude
Ano: 2010
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2010 - PETROQUÍMICA SUAPE - Engenheiro de Equipamento Pleno - Eletricidade |
Q185129
Engenharia Eletrônica
Corresponde(m) ao sistema modelado acima a(s) característica(s)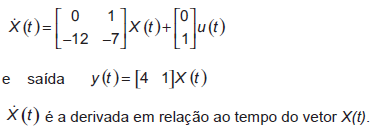
Tal sistema pode se caracterizar por ser
I - controlável.
II - observável.
III - estável.
Corresponde(m) ao sistema modelado acima a(s)
característica(s)
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
TRT - 21ª Região (RN)
Prova:
CESPE - 2010 - TRT - 21ª Região (RN) - Analista Judiciário - Engenharia Elétrica |
Q110256
Engenharia Eletrônica
Com relação a sistemas lineares contínuos com entrada x(t) e saída y(t), julgue o item abaixo.
Considerando que a, b e k sejam constates, o sistema descrito pela equação diferencial é linear.
é linear.
Considerando que a, b e k sejam constates, o sistema descrito pela equação diferencial
é linear.