Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 192 questões
Ano: 2015
Banca:
FCC
Órgão:
DPE-RR
Prova:
FCC - 2015 - DPE-RR - Engenheiro Eletrônico ou Mecatrônico |
Q593050
Engenharia Eletrônica
Sobre um circuito RLC série, onde XL = módulo da reatância indutiva, XC = módulo da reatância capacitiva,
Ano: 2015
Banca:
INSTITUTO AOCP
Órgão:
EBSERH
Prova:
AOCP - 2015 - EBSERH - Engenheiro Eletricista |
Q494874
Engenharia Eletrônica
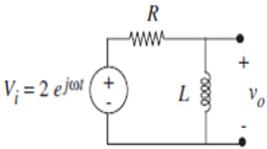
A expressão do ângulo de fase < H( jω), como uma função de ω , para o circuito da figura a seguir, é dada por
Ano: 2015
Banca:
INSTITUTO AOCP
Órgão:
EBSERH
Prova:
AOCP - 2015 - EBSERH - Engenheiro Eletricista |
Q494873
Engenharia Eletrônica
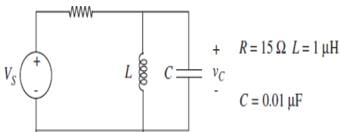
A resposta de entrada zero, do circuito RLC da fgura a seguir será
Ano: 2015
Banca:
INSTITUTO AOCP
Órgão:
EBSERH
Prova:
AOCP - 2015 - EBSERH - Engenheiro Eletricista |
Q494872
Engenharia Eletrônica
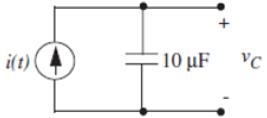
Seja i(t) = 100 µA para 0 < t < 1 s, e zero fora desse intervalo, no circuito da fgura a seguir. Se, em t = 2, a tensão do capacitor for igual a 5 V, é correto afrmar que, no tempo t = - 1 s, a tensão do capacitor será igual a
Ano: 2015
Banca:
INSTITUTO AOCP
Órgão:
EBSERH
Prova:
AOCP - 2015 - EBSERH - Engenheiro Eletricista |
Q494871
Engenharia Eletrônica
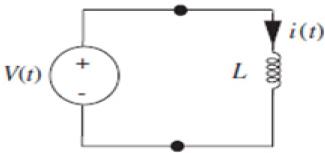
Supondo que um relé possa ser modelado como um indutor, tendo uma indutância de 10 mH, conforme fgura a seguir. Supondo, ainda, que ele fechará uma chave mecânica quando a sua corrente alcançar um valor igual a 10 mA. O degrau de tensão que deve ser aplicado ao relé para que a chave se feche em 100 µs, é igual a
Ano: 2014
Banca:
FGV
Órgão:
AL-BA
Prova:
FGV - 2014 - AL-BA - Técnico de Nível Superior - Engenharia Elétrica |
Q925328
Engenharia Eletrônica
A figura a seguir apresenta um sistema de controle representado pelo diagrama de blocos.
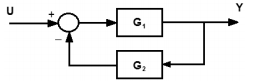
Esse sistema pode ser substituído por uma única função de
transferência, conforme
Ano: 2014
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2014 - Petrobras - Engenheiro(a) de Equipamentos Júnior - Eletrônica |
Q462958
Engenharia Eletrônica
Texto associado
A Figura abaixo representa a resposta ao degrau de um sistema de controle, em que as unidades dos eixos horizontal e vertical foram suprimidas por não interferirem na análise.
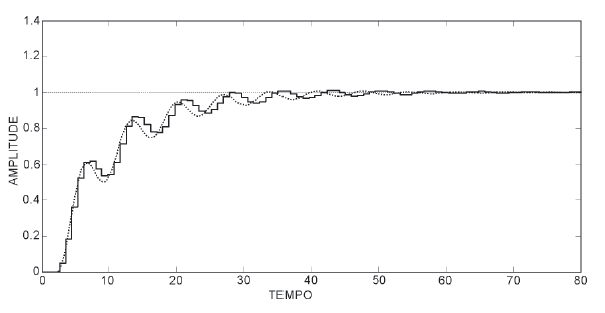
Com relação à sua natureza, os sinais referentes à resposta em linha pontilhada e em linha contínua, mostradas nessa Figura, são classificados, respectivamente, como
Ano: 2014
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2014 - Petrobras - Engenheiro(a) de Equipamentos Júnior - Eletrônica |
Q462957
Engenharia Eletrônica
Texto associado
As Figuras abaixo mostram dois sistemas (I e II), apresentados como resposta ao impulso.
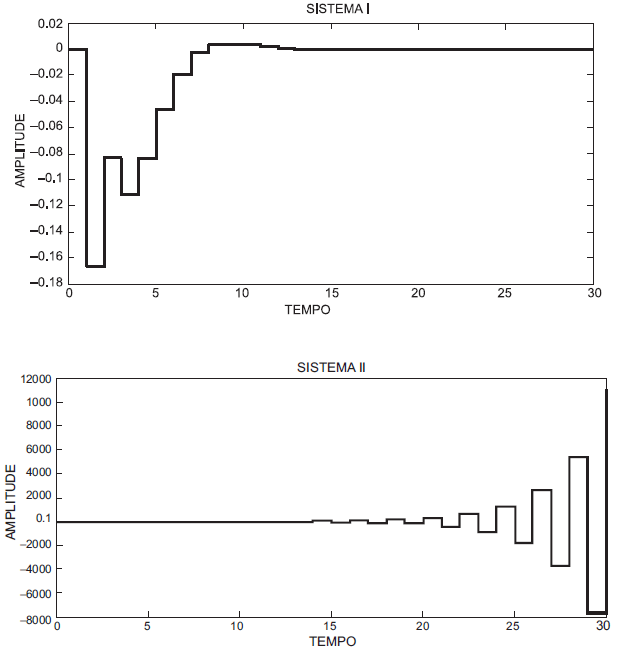
Após a análise dessas Figuras, constata-se que
Ano: 2014
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2014 - Petrobras - Engenheiro(a) de Equipamentos Júnior - Elétrica |
Q454077
Engenharia Eletrônica
Considere a matriz 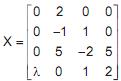
Sendo o determinante da matriz X igual a -30, qual é o valor do parâmetro λ?
Sendo o determinante da matriz X igual a -30, qual é o valor do parâmetro λ?
Ano: 2014
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2014 - Petrobras - Engenheiro(a) de Equipamentos Júnior - Elétrica |
Q454076
Engenharia Eletrônica
Seja a matriz quadrada A = 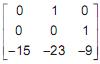 Os autovalores dessa matriz são as raízes do seu polinômio característico, obtidos da relação det(λI - A) = 0.
Os autovalores dessa matriz são as raízes do seu polinômio característico, obtidos da relação det(λI - A) = 0.
Considerando-se que um de seus autovalores vale -1, a soma de todos os seus autovalores é igual a
Os autovalores dessa matriz são as raízes do seu polinômio característico, obtidos da relação det(λI - A) = 0.Considerando-se que um de seus autovalores vale -1, a soma de todos os seus autovalores é igual a
Ano: 2014
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2014 - Petrobras - Engenheiro(a) de Equipamentos Júnior - Elétrica |
Q454075
Engenharia Eletrônica
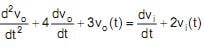
Um circuito elétrico tem seu modelo representado pela seguinte equação diferencial ordinária:
onde
• vi (t)é o sinal da fonte de tensão na entrada do circuito, dado por vi (t) = 3e-2t , para t ≥ 0, e nulo para t<0.
• v0 (t) é o sinal medido como tensão na saída do circuito.
Com base nos dados apresentados e considerando, no modelo matemático, as condições iniciais nulas, a expressão do sinal de saída para t ≥ 0 é
onde
• vi (t)é o sinal da fonte de tensão na entrada do circuito, dado por vi (t) = 3e-2t , para t ≥ 0, e nulo para t<0.
• v0 (t) é o sinal medido como tensão na saída do circuito.
Com base nos dados apresentados e considerando, no modelo matemático, as condições iniciais nulas, a expressão do sinal de saída para t ≥ 0 é
Ano: 2014
Banca:
FGV
Órgão:
DPE-RJ
Prova:
FGV - 2014 - DPE-RJ - Técnico Superior Especializado - Engenharia Elétrica |
Q422752
Engenharia Eletrônica
Considere as afirmativas abaixo a respeito de um sistema de segunda ordem com relação à análise de resposta transitória.
Situações
I. Subamortecido
II. Criticamente Amortecido
III. Sobreamortecido
Características
1. Dois polos reais e distintos. O sistema se aproxima do comportamento de um sistema de 1a ordem com o aumento do fator de amortecimento.
2. Dois polos reais e iguais. O sistema passa a não ter mais oscilações a partir do valor de fator de amortecimento igual à unidade.
3. O sistema apresenta oscilações e possui dois polos complexos conjugados.
A associação correta das situações com suas respectivas características é
Situações
I. Subamortecido
II. Criticamente Amortecido
III. Sobreamortecido
Características
1. Dois polos reais e distintos. O sistema se aproxima do comportamento de um sistema de 1a ordem com o aumento do fator de amortecimento.
2. Dois polos reais e iguais. O sistema passa a não ter mais oscilações a partir do valor de fator de amortecimento igual à unidade.
3. O sistema apresenta oscilações e possui dois polos complexos conjugados.
A associação correta das situações com suas respectivas características é
Ano: 2014
Banca:
FGV
Órgão:
DPE-RJ
Prova:
FGV - 2014 - DPE-RJ - Técnico Superior Especializado - Engenharia Elétrica |
Q422736
Engenharia Eletrônica
Considere as seguintes afirmativas a respeito de estabilidade de sistemas:
I. O sistema é estável se tiver qualquer polo na parte real positiva.
II. O sistema é estável se, quando sujeito a uma entrada impulso, a saída tende a zero à medida que o tempo tende ao infinito.
III. O sistema é criticamente estável se qualquer polo tiver a parte real nula.
Assinale - se
I. O sistema é estável se tiver qualquer polo na parte real positiva.
II. O sistema é estável se, quando sujeito a uma entrada impulso, a saída tende a zero à medida que o tempo tende ao infinito.
III. O sistema é criticamente estável se qualquer polo tiver a parte real nula.
Assinale - se
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
TJ-SE
Prova:
CESPE - 2014 - TJ-SE - Analista Judiciário - Engenharia Elétrica |
Q405646
Engenharia Eletrônica
Um sistema linear, invariante no tempo contínuo, sem memória em t = 0, é definido pela equação diferencial  e pode ser representado no espaço de estados pelas seguintes equações matriciais:
e pode ser representado no espaço de estados pelas seguintes equações matriciais:
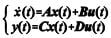
Com base nessas informações, julgue os itens subsecutivos.
A forma canônica controlável da matriz A é dada por

e pode ser representado no espaço de estados pelas seguintes equações matriciais: Com base nessas informações, julgue os itens subsecutivos.
A forma canônica controlável da matriz A é dada por
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
TJ-SE
Prova:
CESPE - 2014 - TJ-SE - Analista Judiciário - Engenharia Elétrica |
Q405641
Engenharia Eletrônica

No diagrama de blocos mostrado na figura acima, em que G1(s) = s+1, G2(s) = s2 , G3(s) = s, a entrada U(s) é nula no instante inicial. Julgue os próximos itens, a respeito da função de transferência G(s) = Y(s)/U(s).
O sistema representado pela função de transferência G(s) é de segunda ordem.
O sistema representado pela função de transferência G(s) é de segunda ordem.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
TJ-SE
Prova:
CESPE - 2014 - TJ-SE - Analista Judiciário - Engenharia Elétrica |
Q405640
Engenharia Eletrônica
No diagrama de blocos mostrado na figura acima, em que G1(s) = s+1, G2(s) = s2 , G3(s) = s, a entrada U(s) é nula no instante inicial. Julgue os próximos itens, a respeito da função de transferência G(s) = Y(s)/U(s).
O sistema representado pela função G(s) é estável.
O sistema representado pela função G(s) é estável.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2014 - Polícia Federal - Engenheiro Eletricista |
Q404917
Engenharia Eletrônica
Com relação aos conceitos de teoria de controle e técnicas de processamento de sinais, julgue os próximos itens.
Se os sinais 1 e 2 ilustrados abaixo, de mesma amplitude pico-a-pico, fase e período, forem processados por um osciloscópio digital de 1 GHz de largura de faixa e canais de aquisição com acoplamento CC, então as suas transformadas rápidas de Fourier (FFT) serão iguais.
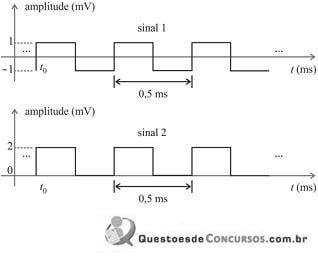
Se os sinais 1 e 2 ilustrados abaixo, de mesma amplitude pico-a-pico, fase e período, forem processados por um osciloscópio digital de 1 GHz de largura de faixa e canais de aquisição com acoplamento CC, então as suas transformadas rápidas de Fourier (FFT) serão iguais.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2014 - Polícia Federal - Engenheiro Eletricista |
Q404916
Engenharia Eletrônica
Com relação aos conceitos de teoria de controle e técnicas de processamento de sinais, julgue os próximos itens.
Considere o gráfico abaixo, que representa a resposta impulsiva de um sistema dinâmico linear de segunda ordem em uma janela temporal de cinco constantes de tempo. Nessa situação, o sistema pode ser corretamente caracterizado por um par de polos complexos conjugados com valores aproximados de -10 + j50p e -10 - j50p.
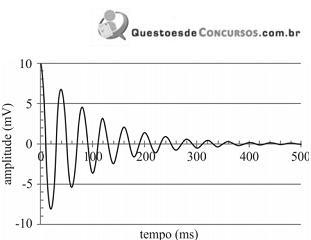
Considere o gráfico abaixo, que representa a resposta impulsiva de um sistema dinâmico linear de segunda ordem em uma janela temporal de cinco constantes de tempo. Nessa situação, o sistema pode ser corretamente caracterizado por um par de polos complexos conjugados com valores aproximados de -10 + j50p e -10 - j50p.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2014 - Polícia Federal - Engenheiro Eletricista |
Q404915
Engenharia Eletrônica
Com relação aos conceitos de teoria de controle e técnicas de processamento de sinais, julgue os próximos itens.
Se a figura abaixo representa o mapa de polos (identificados por ‘x’) e zeros (identificados por ‘0’) de uma função de transferência em malha fechada de um sistema dinâmico linear, então o sistema é estável e gera uma saída com amplitude não nula, em regime permanente, quando a entrada é uma função do tipo degrau.
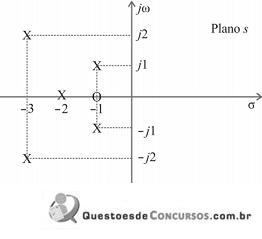
Se a figura abaixo representa o mapa de polos (identificados por ‘x’) e zeros (identificados por ‘0’) de uma função de transferência em malha fechada de um sistema dinâmico linear, então o sistema é estável e gera uma saída com amplitude não nula, em regime permanente, quando a entrada é uma função do tipo degrau.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
TRT - 10ª REGIÃO (DF e TO)
Prova:
CESPE - 2013 - TRT - 10ª REGIÃO (DF e TO) - Analista Judiciário - Engenharia |
Q801263
Engenharia Eletrônica
Considerando que, em condições de contorno iniciais nulas, um sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 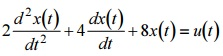 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
Se o sinal de entrada for do tipo função degrau, a resposta
desse sistema, em regime permanente, será sempre nula.