Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 186 questões

Sobre esse sistema é aplicado um controle com realimentaçãode estados, cuja lei de controle é dada poru(t) = -K X(t) + r(t), onde são definidos o vetor de ganhosK = [k1 k2] e r(t), o sinal de entrada de referência.
Para que em malha fechada os polos desse sistema sejam complexos conjugados e alocados em s = -5 ± j10,qual será o valor do vetor de ganhos K?
Uma sequência x(n) discreta e causal, que significa dizer que x(n) = 0 para n < 0, tem como transformada Z a expressão: X(z) = 7z2 - 11z/ z2 - 4z + 3 .
A expressão mais simples, em função do degrau
unitário u(n), que melhor exprime analiticamente essa
sequência é:
Para responder à questão, quando necessário, considere:
π = 3,14 √2 = 1,41
Analise a descrição abaixo de estados de um sistema sequencial.
• Entrada: x(t) ∈ {0,1,2,3]
• Saída: z(t) ∈ {a,b}
• Estado: s(t) ∈ {S0 , S1}
• Estado Inicial: s(0) = S0
• Funções:
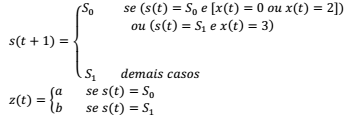
Assinale a opção que representa o diagrama de estados obtido, diretamente, dessas expressões.
Considere um sistema representado no espaço de estados pelo seguinte conjunto de equações matriciais:
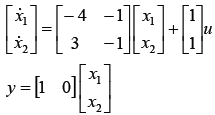
A função de transferência G(s) que representa o sistema está corretamente
indicada em:
A questão refere-se ao sistema linear em malha
fechada, representado na figura seguinte:
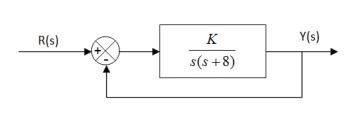
Quando é aplicado um impulso unitário, na entrada desse sistema, o sinal de saída y(t) assume a forma
y(t) = Me-σ t sen(ωt).
De acordo com as informações fornecidas, o sistema é
No que diz respeito à análise de resposta transitória, relacione as situações de amortecimento às respectivas características.
Situações:
( ) Criticamente Amortecido
( ) Subamortecido
( ) Sobreamortecido
Características:
1. Dois polos reais e distintos.
2. Dois polos complexos conjugados.
3. Dois polos reais e iguais.
Assinale a opção que indica a relação correta, de cima para baixo.
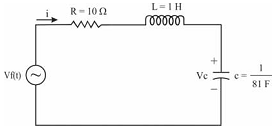
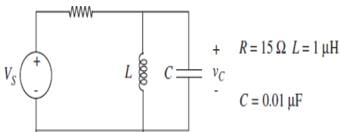
Considerando que, para o circuito RLC apresentado na figura, as
variáveis de estado do sistema sejam x1 = i e x2 = vc, assinale a
opção correta acerca de sistemas lineares.
 C
C

Considerando que, no circuito apresentado, a chave esteve na posição original por muito tempo e, em t = 0, muda de posição conforme ilustrado, julgue o item que se segue.
Se a fonte dependente for substituída por um indutor de 2,5 H,
o fator de amortecimento do circuito será inferior a ½.
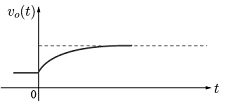
Considerando que, no circuito apresentado, a chave esteve na posição original por muito tempo e, em t = 0, muda de posição conforme ilustrado, julgue o item que se segue.
A figura a seguir ilustra de forma correta o comportamento da tensão no capacitor do circuito.
Considerando que, no circuito apresentado, a chave esteve na posição original por muito tempo e, em t = 0, muda de posição conforme ilustrado, julgue o item que se segue.
No instante de tempo imediatamente anterior à mudança de
posição da chave, a corrente no indutor era igual a 1 mA.
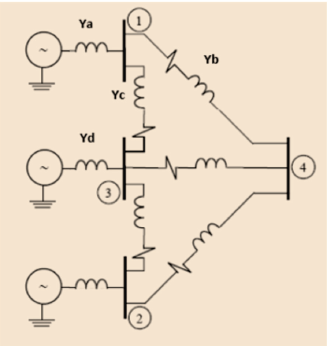
As expressões que traduzem os elementos da Y22 e Y14 da matriz de admitância nodal, respectivamente, são:
Se um sistema linear de segunda ordem tem coeficiente de amortecimento maior que 1, esse sistema é denominado sobreamortecido.