Questões de Concurso
Sobre análise de sistemas lineares em engenharia eletrônica
Foram encontradas 192 questões

Nele, a entrada é uma onda quadrada de frequência 1 kHz, sendo que em 50% do tempo ela está a 6 V e em 50% do tempo, a 2 V. A saída indicada será a superposição de senoides de apenas frequências iguais a: Obs.: considera-se que existe uma componente senoidal se sua amplitude, após uma decomposição de Fourier, é não nula.
A Figura a seguir mostra um sinal temporal v(t) que representa um pulso retangular.

A Transformada de Fourier (TF) aplicada ao sinal é obtida pela integral:

O resultado dessa integral será uma função complexa V(ω), que tem como argumento a frequência angular, representada pela variável ω[rad/s].
Considerando-se os dados da Figura, a expressão dessa
Transformada de Fourier é
O gráfico mostrado na Figura a seguir apresenta a resposta ao degrau de um sistema de 2ª ordem. Esse sistema é representado pela seguinte Função de Transferência entre entrada e saída, onde o parâmetro B é desconhecido:

Com base nos dados da Figura, os valores do parâmetro
B e os da Razão de Amortecimento do sistema são, respectivamente,
O diagrama em blocos da Figura mostra um sistema linear, cujos blocos estão representados por Funções de Transferência em Laplace, configurando uma estrutura de Controle e Servomecanismos. A estrutura encontra-se em malha fechada, utilizando uma realimentação negativa de saída.

Para que o sistema, em malha fechada, tenha uma razão
de amortecimento de 0,5, o valor do ganho K será
Considere o sinal temporal de tensão causal e não periódico dado por x(t) = Ae- τ/t , onde τ é uma constante de
tempo. Seu espectro de frequência é  ,
obtido a partir da transformada de Fourier do sinal x(t).
,
obtido a partir da transformada de Fourier do sinal x(t).
A expressão da frequência, em Hertz, no ponto de meia potência do espectro |X(f)| é igual a
Um determinado sistema dinâmico monovariável apresenta o seguinte modelo, sob a forma de espaço de estado:

em que u representa o sinal de entrada, y, o sinal de saída, e x, o vetor de estados.
Qual deverá ser o modelo desse sistema, sob a forma de
função de transferência G(s) = Y(s)/U(s)?

Um engenheiro deseja modificar o comportamento dinâmico de um sistema modelado por meio de função de transferência. Para isso, realiza uma realimentação negativa da saída, a partir do ajuste do ganho K > 0, conforme apresentado na Figura acima.
Analisando-se o diagrama do Lugar das Raízes (root locus), verifica-se que o sistema em malha fechada será

Na Figura acima encontra-se ilustrado um sistema discreto, modelado por meio da função de transferência de 3ª ordem apresentada.
No que se refere à posição dos polos e à estabilidade,
esse sistema é

Na Figura (X), encontra-se um circuito alimentado por uma fonte senoidal de amplitude Vi . Aplicando-se o teorema de Thevenin na parte do circuito dentro do retângulo tracejado, é possível substituir esse circuito por uma fonte de tensão senoidal de amplitude VTh em série com um resistor RTh, conforme a Figura (Y).
Nesse caso, qual será a resistência, em ohms, de RTh?

Na Figura acima, encontra-se apresentado um circuito alimentado por uma fonte de tensão DC e cujos componentes são considerados ideais. Suponha, inicialmente, que o capacitor esteja descarregado e que a chave S esteja aberta. Em t = 0, a chave S é fechada.
Considerando o tempo t em segundos, qual deverá ser a expressão da tensão v2 (t), em volts, para t ≥ 0?

O circuito ilustrado na Figura acima contém um amplificador operacional, considerado ideal.
Se no instante t = 0 for aplicado o sinal de tensão
senoidal Vi
(t) = 3 sen(ωt) na entrada desse circuito, com
ω = 1.000 rad/s, qual deverá ser a resposta Vo
(t) do circuito em regime permanente?

A Figura acima apresenta uma representação no domínio da frequência de um circuito composto por uma fonte de tensão, uma fonte de corrente, dois resistores, um indutor e um capacitor, todos considerados ideais.
A expressão que fornece o valor da tensão V1
, em volts,
é dada por
I. a quantidade de energia elétrica consumida pela lâmpada num período de 10 horas diárias num mês de 30 dias; II. o valor a ser pago por esse consumo, sabendo que a empresa de energia elétrica cobra a tarifa de R$1,20 por kWh mais um imposto de 10%.
Os valores indicados em (I) e em (II) são, respectivamente,
No circuito abaixo são conhecidos os valores de I1, I2 e I4.
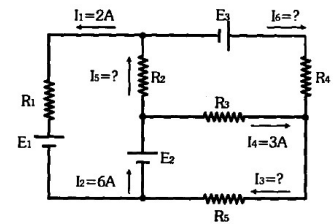
Por meio da Lei de Kirchoff para correntes, verifica-se que os
valores de I3, I5 e I6 são, respectivamente,
Sua representação é dada pelas equações matriciais:
 (t) = AX(t) + Bu(t) e y(t) = CX(t)
(t) = AX(t) + Bu(t) e y(t) = CX(t) onde
 (t) corresponde à 1a
derivada do vetor de estados
em relação ao tempo, e os componentes são:
(t) corresponde à 1a
derivada do vetor de estados
em relação ao tempo, e os componentes são:
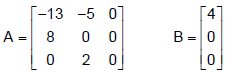 C = [0 1 2]
C = [0 1 2]Por ser um sistema de terceira ordem, os valores dos seus três polos são:
Considere um sistema dinâmico linear, representado pelas equações diferenciais a seguir, onde x1 e x2 são variáveis de estado, u é uma força exógena e k é uma constante.
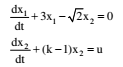
Quanto à relação entre o valor da constante k e a estabilidade
interna do sistema, é correto afirmar que o sistema é
Julgue o próximo item, considerando a teoria de controle.
O controle derivativo é utilizado de forma isolada no
sistema, o que implica a redução do custo do controle desse
sistema.
Julgue o próximo item, considerando a teoria de controle.
Uma ação de controle integral aumenta o erro residual do
sistema.
Sobre os subespaços de Mn,n , considere os seguintes itens:
1. Matrizes n × n em todas as entradas são constituídas por inteiros.
2. Matrizes n × n em que A = At .
3. Matrizes n × n triangulares superiores.
4. Matrizes n × n em que det A = 0.
Os subespaços de Mn,n estão corretos em: