Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 145 questões
Analise os Sistemas Dinâmicos a seguir.
SISTEMA I: 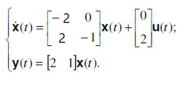
SISTEMA II: 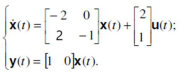
Sobre a controlabilidade e a observalidade desses sistemas, é correto afirmar que são, respectivamente,

O baixo custo é uma das vantagens do controlador 1, que pode ser amplamente utilizado tanto em sistemas de controle industriais quanto domésticos.
A ação de controle do controlador 2 é denominada controle de taxa, visto que é proporcional à taxa de variação do sinal de erro atuante.
O controlador automático determina o desvio entre a saída do processo e o valor de referência, produzindo um sinal de controle que reduz o desvio a zero ou a um pequeno valor.

O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
O uso do termopar como sensor de temperatura tornaria o condicionador de sinal desnecessário.
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
Quando o sensor de temperatura termorresistivo é um RTD (resistive temperature detector) de platina, a calibração do sistema não se faz necessária.
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
Caso a planta esteja localizada em um ambiente industrial susceptível a ruído elétrico, um controlador do tipo PID poderia tornar-se
instável devido ao termo derivativo.
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
O sinal de erro em regime permanente pode ser reduzido a zero, caso o controle de temperatura da planta seja realizado por um controlador do tipo proporcional (controlador P).
A componente do erro de estado estacionário devido a uma perturbação em degrau, para o sistema abaixo é:
O controlador lógico programável possui interfaces com os sensores e atuadores do processo a ser automatizado. Esse tipo de controlador possui módulos de entrada e saída que tanto podem ser analógicos quanto digitais, de acordo com a natureza do processo e de suas variáveis.
O uso de controlador PID é adequado para eliminar erros de regime permanente (ação derivativa), antecipar o comportamento do processo (ação integral) e reagir ao erro presente, conferindo ao sistema de controle uma reação rápida à ação de perturbações ou variações de referência de magnitudes significativas (ação proporcional).
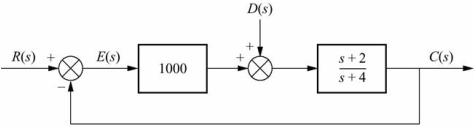
Se é do interesse escolher um nível de luminosidade específico, não bastando saber se tem luz ambiente ou não, qual tipo de porta desse controlador deve ser utilizado?