Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 145 questões
Em um sistema de controle de processo com retroalimentação, pode-se afirmar que:
I – o sinal de saída referente é sempre mensurado e comparado com o sinal de entrada de referência, possibilitando, assim, um ajuste do controle, tornando o processo mais estável;
II – o controle de processo por retroalimentação não depende do sinal de saída do processo;
III – o sinal de entrada é comparado com um valor de referência fixo, aumentando, assim, a estabilidade do sistema.
Está correto o que se afirma em

A respeito do elemento sensor e do elemento de condicionamento de sinal, normalmente necessários em um sistema de controle digital, julgue o item subsequente.
Caso o elemento sensor seja resistivo, o elemento de
condicionamento pode ser um circuito do tipo ponte de
deflexão resistiva.
Um circuito de condicionamento do tipo ponte de deflexão reativa necessita de alimentação CC (de corrente contínua).
Em um sistema de controle digital cujo objetivo seja compensar a dinâmica de determinado processo físico de natureza analógica, se fazem necessárias as interfaces de aquisição e de distribuição. A respeito dessas interfaces, julgue o item a seguir.
Os circuitos de amostragem e retenção (sample and hold)
normalmente são implementados utilizando-se buffers de
tensão (amplificador de tensão com ganho unitário, alta
impedância de entrada e baixa impedância de saída), além de
capacitor e chave eletrônica.
Em um sistema de controle digital cujo objetivo seja compensar a dinâmica de determinado processo físico de natureza analógica, se fazem necessárias as interfaces de aquisição e de distribuição. A respeito dessas interfaces, julgue o item a seguir.
De forma geral, o último estágio da interface de distribuição é
um atuador digital.
O gráfico abaixo representa a resposta a uma dada alteração de carga.
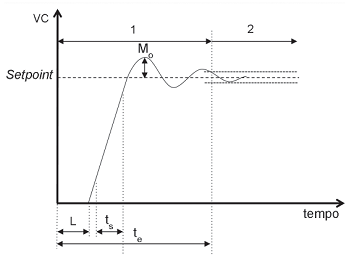
As inscrições nesse gráfico podem ser descritas:
A Figura abaixo é um diagrama de blocos representativo de um sistema de controle.
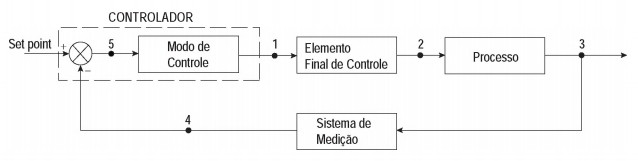
A variável manipulada e a variável controlada são aquelas presentes nos fluxos de sinal indicados, respectivamente, pelos
números
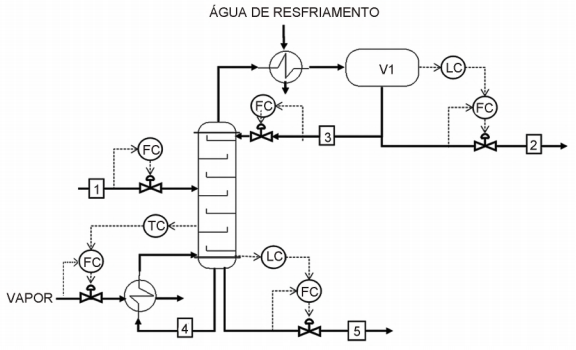
Na coluna representada na Figura, não havendo mudança de set points em relação à condição normal de operação, o resultado de um cenário de inundação da coluna tipicamente leva o operador a observar um
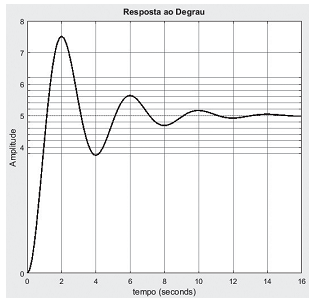
Dada a resposta ao degrau de um sistema dinâmico, determine os valores do sobressinal (Mp) e do tempo de acomodação (ta) para um critério de erro de 5%.
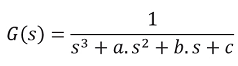
Utilize o método de Routh-Hurwitz para determinar os valores de a, b e c que garantem a estabilidade do sistema:
Considerando que, em condições de contorno iniciais nulas, um sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 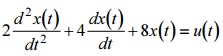 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
No domínio da frequência, esse sistema apresenta dois polos
complexos conjugados e um único zero finito.
Considerando que, em condições de contorno iniciais nulas, um
sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 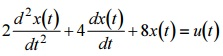 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
Considere a situação em que todas as variáveis do sistema
devam ser convertidas do modo contínuo para o discreto.
Nesse caso, a frequência mínima para amostragem do sinal
deverá ser superior a 0,40 Hz.
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
No projeto de controle por realimentação do vetor de
estados, os polos do sistema não podem ser alocados em
qualquer local, sendo restringidos pelo lugar geométrico
das raízes.
Em relação a controles e sistemas lineares, não lineares e digitais, julgue o seguinte item.
Um sistema de tipo 0 apresenta erro constante, em
regime permanente, em resposta a uma entrada em
degrau.
Acerca de controle linear, julgue o item a seguir.
O controle derivativo deve ser usado sozinho para evitar-se o incremento do erro atuante.