Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 147 questões
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107784
Engenharia Eletrônica
Texto associado
Os controladores PID contínuos no tempo e suas variantes são
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
Considere um sistema que, em malha aberta, possua a função de transferência G(s) =  em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107783
Engenharia Eletrônica
Texto associado
Os controladores PID contínuos no tempo e suas variantes são
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
O controle de ação derivativa tende a diminuir muito a velocidade de resposta do sistema para entrada do tipo degrau.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107782
Engenharia Eletrônica
Texto associado
Os controladores PID contínuos no tempo e suas variantes são
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
O controle de ação integral permite melhorar a resposta em regime permanente do sistema em malha fechada, para os tipos de entrada que podem ser rastreados pelo sistema.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107781
Engenharia Eletrônica
Texto associado
Os controladores PID contínuos no tempo e suas variantes são
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
O controlador de ação proporcional aumenta o tipo do sistema, pois adiciona polos à função de transferência de malha aberta do sistema: no caso, polos localizados na origem do plano complexo s.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
STM
Prova:
CESPE - 2011 - STM - Analista Judiciário - Engenharia Elétrica - Específicos |
Q107780
Engenharia Eletrônica
Texto associado
Os controladores PID contínuos no tempo e suas variantes são
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
O controle de ação derivativa insere na função de transferência de malha aberta do sistema um polo, com localização na origem do plano complexo s.
Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82758
Engenharia Eletrônica

Ano: 2010
Banca:
FCC
Órgão:
TRT - 8ª Região (PA e AP)
Prova:
FCC - 2010 - TRT - 8ª Região (PA e AP) - Analista Judiciário - Engenharia Elétrica |
Q82741
Engenharia Eletrônica
Considere as figuras I e II abaixo.
I. Sistema de controle proporcional-integral de velocidade de um motor DC:
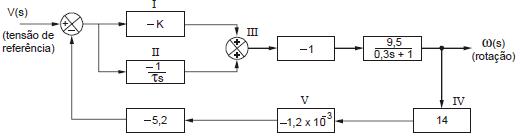
II. Circuito integrador:
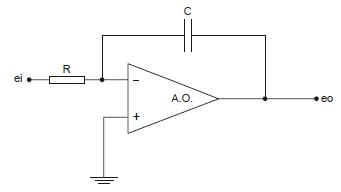
No sistema, o circuito integrador está representado pelo bloco
I. Sistema de controle proporcional-integral de velocidade de um motor DC:
II. Circuito integrador:
No sistema, o circuito integrador está representado pelo bloco