Questões de Concurso
Sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 146 questões
Julgue o próximo item, relativo à teoria de controle.
Controles PID são inadequados para uso em sistemas não lineares, devido à sua estrutura linear.
Existem diversas técnicas para sintonia dos parâmetros desse tipo de controlador, a qual deve ser escolhida de acordo com as características do sistema como um todo.
Uma destas técnicas é o método
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Coluna 1
1. Tensão de linha.
2. Sequência de fase.
3. Gerador CA conectado em ∆.
4. Gerador trifásico conectado em Y.
5. Tensão de fase.
Coluna 2
( ) Tensão entre uma linha e um neutro de um gerador conectado em Y ou tensão entre duas linhas de um gerador em ∆.
( ) Os três condutores usados para conectar os terminais à carga do circuito são chamados de linhas.
( ) Ordem na qual as tensões senoidais produzidas por um gerador polifásico afetam a carga na qual estão conectadas.
( ) As tensões de fase e de linha são equivalentes e têm o mesmo valor que as tensões induzidas nos enrolamentos.
( ) Diferença de potencial que existe entre as linhas de um sistema monofásico ou polifásico.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Condutores de menor diâmetro podem ser usados para transmitir a mesma potência à mesma tensão, o que reduz a quantidade de cobre necessário (normalmente, cerca de 25% a menos) e, consequentemente, os custos de fabricação e manutenção das linhas.
( ) Linhas mais robustas são mais fáceis de instalar e suas torres de sustentação podem ser mais delgadas e mais espaçadas.
( ) Equipamentos e motores trifásicos apresentam melhores características de partida e operação que os sistemas monofásicos, pois a transferência de potência da fonte para a carga nos sistemas monofásicos está menos sujeita à flutuação do que nos sistemas trifásicos.
( ) Em geral, a grande maioria dos motores de grande porte é trifásica porque a partida não precisa de um projeto especial ou de circuitos externos adicionais.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
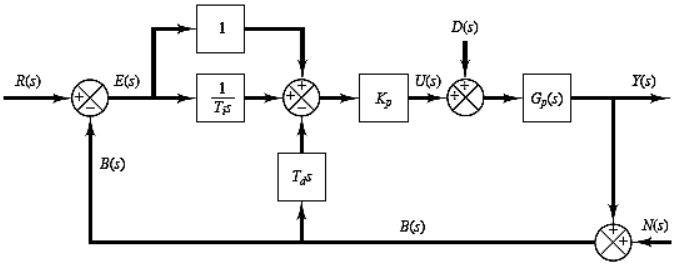
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?
analise as seguintes afirmativas.
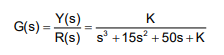
I. A implementação pneumática (Figura 1.b) é do controlador PID.
II. As implementações apresentadas (Figuras 1.a e 1.b) representam o mesmo controlador.
III. As respostas 3), 1) e 2) (Figura 1.c) são devidas às ações proporcional, proporcional-integral-derivativa e proporcional-integral.
IV. Nas respostas 1), 2) e 3) (Figura 1.c) não há ação derivativa.
V. A ação 2) (Figura 1.c) corresponde à ação proporcional-derivativa.
VI. A ação que corresponde à implementação pneumática (Figura 1.b) é ação 1) (Figura 1.c).
São corretas as afirmativas:
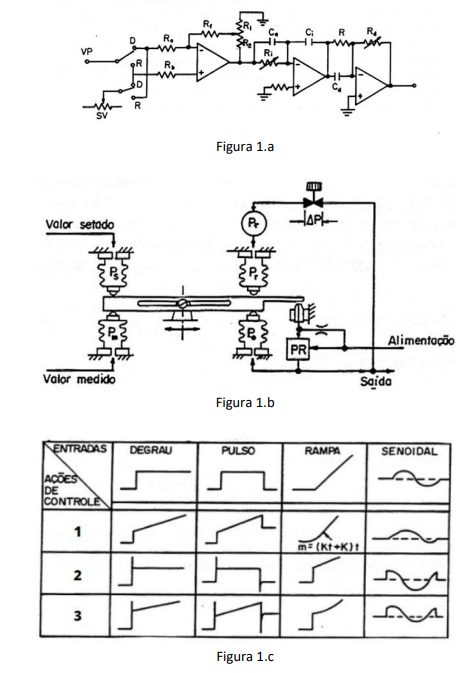
Analise a imagem e considere: Gc1 e Gc2 controladores PID e autovalores reais e distinto.
Para facilitar o ajuste dos controladores PID é necessário projetar uma realimentação de estados por alocação de polos, de forma que o sistema dinâmico equivalente no espaço de estados esteja na forma canônica:
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
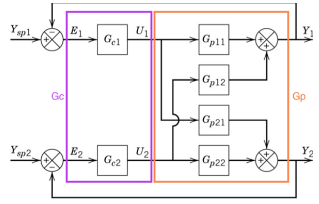
Em sistemas de controle lineares e contínuos no tempo, o controlador PID produz o sinal de controle u(t), a partir do sinal de erro e(t), através da seguinte equação:

Uma forma prática de se construir um controlador eletrônico do tipo PID é mostrada no diagrama de circuito abaixo.

Considerando-se os amplificadores operacionais ideais, o
ganho integral Ki
desse controlador PID, expresso em s-1
,
é igual a
O tipo de controle no qual a saída é um sinal K vezes maior do que a entrada e que os limites superior e inferior ao serem atingidos (saturação do sistema) são controlados, mas sem rejeitar completamente distúrbios e erros, é o controle
Analise os Sistemas Dinâmicos a seguir.
SISTEMA I: 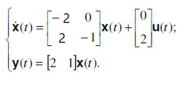
SISTEMA II: 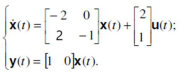
Sobre a controlabilidade e a observalidade desses sistemas, é correto afirmar que são, respectivamente,

O baixo custo é uma das vantagens do controlador 1, que pode ser amplamente utilizado tanto em sistemas de controle industriais quanto domésticos.