Questões de Concurso
Sobre automação na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 92 questões
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
O servo-controle visual estabelece um sistema de controle
em malha fechada, em que o processamento de imagens gera
informações a serem realimentadas para o controlador.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
No servo-controle visual baseado em posição, omite-se a
estimação da postura, e as características da imagem são
usadas diretamente, ou seja, o controle é realizado no espaço
bidimensional de coordenadas da imagem.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
Algoritmos para estimação da postura do objeto de
referência em relação à câmera são computacionalmente
pesados e dependem criticamente da precisão de calibração
da câmera e do modelo geométrico do objeto.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
Para implementação de controle servo-visual, é preciso que a
câmera esteja fixada na ferramenta de trabalho do robô.
O objetivo do servo-controle visual é ajustar a postura, ou seja, a posição e a orientação da ferramenta de um robô em relação a algum objeto-alvo de referência, a partir da extração de características de imagens. A respeito de servo-controle visual de robôs, julgue o item a seguir.
Servo-controle visual não permite o rastreamento de
objetos-alvo que estejam em movimento.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
Unidades de medição inercial são utilizadas para
sensoriamento de informações acústicas provenientes do
usuário.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
No âmbito de IHR, a técnica de personas corresponde a uma
ferramenta de desenvolvimento.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
No conceito de IHR centrada no robô, avalia-se como o robô
pode completar suas especificações de tarefas de maneira
que seja aceitável e confortável aos humanos.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
A IHR pode se dar por meio vocal, visual e tátil.
Acerca da interação humano-robô (IHR), julgue o item subsequente.
Certos tipos de robôs de serviço também podem ser
desenvolvidos segundo a abordagem IHR.
Fonte: IFSP, 2023.
Fonte: IFSP, 2023.
Acerca de projetos de sala de controle voltados para sistemas de rede, julgue o item a seguir.
A norma ISO 11064 fornece diretrizes específicas para o
design ergonômico de salas de controle, incluindo-se
recomendações para leiaute de telas, consoles, equipamentos
e detalhamentos de aspectos relevantes para sistemas de
rede.
Acerca de projetos de sala de controle voltados para sistemas de rede, julgue o item a seguir.
Ao se projetar uma sala de controle para sistemas em rede, é
importante considerar a redundância de todas as conexões e
circuitos de rede para garantir alta disponibilidade e
minimizar interrupções em caso de falhas.
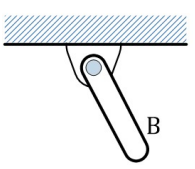
Quantos são os graus de liberdade da barra B mostrada na figura?
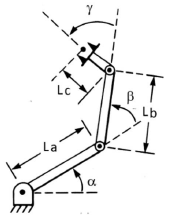
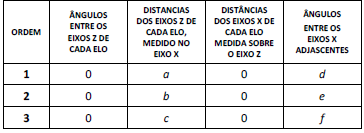 De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
c, d, e, f da tabela são, respectivamente,
De acordo com o Modelo D-H, considerando que os eixos X e
Y estão no plano das articulações do braço do robô, as letras a, b,
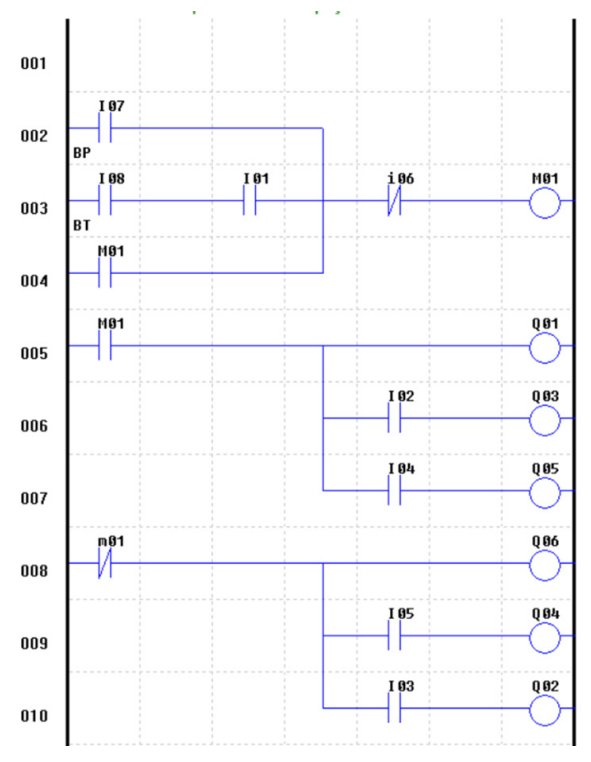
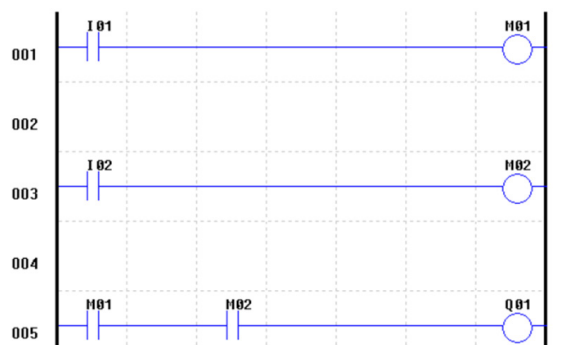
c, d, e, f da tabela são, respectivamente,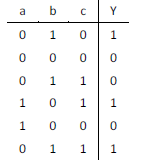 A expressão da saída (Y) na 1ª forma canônica é o que se
apresenta em
A expressão da saída (Y) na 1ª forma canônica é o que se
apresenta emTempo verificado entre a ocorrência de uma alteração no processo e a sua percepção pelo elemento sensor: