Questões de Concurso
Sobre automação na engenharia mecatrônica em engenharia mecatrônica
Foram encontradas 92 questões
Ano: 2021
Banca:
FUNDATEC
Órgão:
Prefeitura de Porto Alegre - RS
Prova:
FUNDATEC - 2021 - Prefeitura de Porto Alegre - RS - Engenheiro Mecânico |
Q1690373
Engenharia Mecatrônica
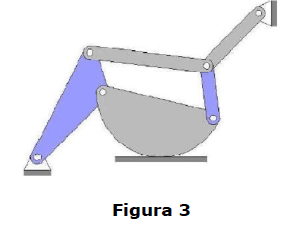
Calcule os graus de liberdade (GDL) do mecanismo da Figura 3 abaixo.
Q1393181
Engenharia Mecatrônica
Com a finalidade de aumentar a aplicação da rede de
Petri, é correto afirmar, sobre as redes de Petri coloridas,
que
Q1393180
Engenharia Mecatrônica
A rede de Petri é uma técnica de modelagem que permite
a representação de sistemas, utilizando como alicerce
uma forte base matemática. Sobre as classes das redes
de Petri, no que diz respeito à rede binária, assinale a
alternativa correta.
Q1393179
Engenharia Mecatrônica
Considerando o princípio de funcionamento de um CLP –
Controlador Lógico Programável, é correto afirmar que
Q1393178
Engenharia Mecatrônica
Sobre a notação de Denavit-Hartenberg (D-H), analise as assertivas abaixo.
I. Denavit e Hartenberg propuseram uma notação sistemática para atribuir um sistema de coordenadas ortonormal com a regra da mão direita, um para cada elo, em uma cadeia cinemática aberta de elos.
II. Este método conduz a uma representação baseada em transformações heterogêneas, que exprimem cada referencial em relação ao referencial anterior.
III. Na representação D-H original, associa-se o eixo de junta ao eixo z e cada matriz é representada pelo produto de quatro transformações básicas envolvendo rotações e translações.
É correto o que se afirma em
Q1393173
Engenharia Mecatrônica
Considerando o funcionamento das juntas em robótica, é
correto afirmar que a junta prismática
Q1393161
Engenharia Mecatrônica
Os sensores são transdutores, ou seja, conversores de
grandezas físicas em sinais elétricos correspondentes.
Dos tipos de sensores, é correto afirmar que os encoders
Q1393160
Engenharia Mecatrônica
Os robôs vêm sendo utilizados em uma gama muito
variada de aplicações industriais. Assinale a alternativa
que apresenta o tipo de robô ao qual o trecho abaixo se
refere.
“Caracterizam-se pela pequena área de trabalho, pelo elevado grau de rigidez mecânica e pela grande exatidão na localização do atuador. Seu controle é simples em razão do movimento linear dos vínculos e de o momento de inércia da carga ser fixo em toda a área de atuação”.
“Caracterizam-se pela pequena área de trabalho, pelo elevado grau de rigidez mecânica e pela grande exatidão na localização do atuador. Seu controle é simples em razão do movimento linear dos vínculos e de o momento de inércia da carga ser fixo em toda a área de atuação”.
Q1393151
Engenharia Mecatrônica
Os algoritmos de busca e de ordenação compreendem um
conjunto de algoritmos de elevada importância para a
computação. Sobre o algoritmo de ordenação denominado
Inserção, assinale a alternativa correta.
Q1393150
Engenharia Mecatrônica
A análise de algoritmos é uma disciplina de engenharia,
pois procura prever o comportamento de um algoritmo
antes que ele seja efetivamente implementado e colocado
“em produção”. A corretude é um dos aspectos
importantes na análise de um algoritmo, sobre a qual é
correto afirmar que
Q1236261
Engenharia Mecatrônica
Sobre a telefonia IP, considere as seguintes características:
1. Transmissão de voz em tempo real, com um tempo de latência menor que 300 ms. 2. Existência de procedimentos de sinalização para o estabelecimento de controle de chamadas e para o fornecimento de serviços adicionais, como conferência, chamadas em espera e transferências. 3. Rotas prefixadas na rede.
É/São requisito(s) da telefonia IP:
1. Transmissão de voz em tempo real, com um tempo de latência menor que 300 ms. 2. Existência de procedimentos de sinalização para o estabelecimento de controle de chamadas e para o fornecimento de serviços adicionais, como conferência, chamadas em espera e transferências. 3. Rotas prefixadas na rede.
É/São requisito(s) da telefonia IP:
Q1221953
Engenharia Mecatrônica
Assinale a alternativa que apresenta as etapas de estabelecimento de uma chamada PoC.
Q1211038
Engenharia Mecatrônica
Sobre os acionamentos dos robôs, é correto afirmar:
Q1188745
Engenharia Mecatrônica
De maneira geral, afirma-se que aos problemas de maximização de programação linear na forma-padrão, corresponde um problema de minimização denominado Problema Dual. Buscando obter as relações entre o Problema Primal e o Problema Dual, sabe-se que
Q1184818
Engenharia Mecatrônica
Um Engenheiro de Controle e Automação utilizou a modelagem no domínio da frequência para determinar parâmetros de um sistema de controle e conclui que
Q1183564
Engenharia Mecatrônica
Quantos graus de liberdade, ou mobilidade, tem um
mecanismo biela manivela de 4 partes:
Ano: 2019
Banca:
FCC
Órgão:
SANASA Campinas
Prova:
FCC - 2019 - SANASA Campinas - Técnico de Instrumentação - Automação de Processos |
Q1036238
Engenharia Mecatrônica
Uma interface homem-máquina, ou IHM como é conhecida, apresenta uma aplicabilidade para que homem e máquina possam
se comunicar. Quando a demanda do sistema supervisório exige melhores resultados em conectividade, acesso remoto, gráficos
e flexibilidade na sua aplicação, a IHM recomendada é a caracterizada por
Q807587
Engenharia Mecatrônica
Em relação aos dispositivos integrantes de uma rede industrial de automação, podemos
afirmar que:
Q134598
Engenharia Mecatrônica
Texto associado
Julgue os itens subsequentes, a respeito do CLP, um equipamento
eletrônico digital amplamente utilizado na automação de plantas
industriais.
eletrônico digital amplamente utilizado na automação de plantas
industriais.
Os CLPs, por questão de segurança, não são dotados de mecanismos de comunicação digital com outros equipamentos.
Q134597
Engenharia Mecatrônica
Texto associado
Julgue os itens subsequentes, a respeito do CLP, um equipamento
eletrônico digital amplamente utilizado na automação de plantas
industriais.
eletrônico digital amplamente utilizado na automação de plantas
industriais.
Módulos de entrada não podem possuir isolamento elétrico com circuitos externos por acoplamento óptico, devido ao fato de os isoladores ópticos terem baixa velocidade de resposta.