Questões de Concurso Sobre engenharia mecatrônica
Foram encontradas 240 questões
Analise o circuito abaixo e assinale as alternativas corretas.
( ) O atuador avança rápido e retorna lento por causa das válvulas de escape rápido e da válvula reguladora de vazão.
( ) Quando a haste do atuador atinge o rolete S1, ocorre o retorno automático.
( ) Durante o recuo do cilindro, o ar entra na válvula de escape rápido pela via 2 e sai pela via 1.
( ) A válvula reguladora de vazão instalada controla a velocidade do cilindro no avanço e no recuo.
( ) Ao comandar a válvula 3/2 vias de botão, o ar que entra na via 1 da válvula, sai na via 2, acionando o piloto da válvula direcional 5/2 vias. Com isso o cilindro avança.
( ) O atuador apresentado no sistema possui duplo amortecimento regulável.
Assinale a alternativa que contém a sequência CORRETA de cima para baixo.
Com relação aos sistemas hidráulicos responda:
I. O índice de viscosidade é a resistência que o óleo apresenta ao escoamento em função da temperatura.
II. O filtro de sucção, instalado na entrada da bomba, tem a mesma capacidade de retenção de partículas que o filtro de pressão e de retorno.
III. Atuador com relação de áreas 2:1, significa que a área do êmbolo é duas vezes maior que a área da coroa.
IV. Os fluidos hidráulicos de base mineral, por causa de suas boas propriedades, dispensa a utilização de aditivos em sua composição.
V. Quanto maior for o índice de viscosidade, menor será a variação da viscosidade em função da temperatura.
Assinale a opção CORRETA:
Qual é nome mais utilizado para o circuito elétrico da Figura XX?
Figura XX.
Relacione os sensores de acordo com sua aplicação:
I. Sensor Indutivo
II. Resolver
III. Sensores de efeito Hall
IV. Encoder
V. Sensor Capacitivo
( ) Sensor utilizado para detecção de metais ferrosos.
( ) Sensor capaz de detectar campos magnéticos.
( ) Sensor de posição com saída digital.
( ) Sensor de posição com saída analógica e variação senoidal.
( ) Sensor capaz de detectar plásticos e metais.
Assinale a alternativa que contém a sequência CORRETA de associação, de cima para baixo.
Em relação às características de um amplificador operacional (AO) e suas aplicações, assinale V para as afirmativas VERDADEIRAS e F para as afirmativas FALSAS.
( ) São características de um AO a alta impedância de entrada, o alto ganho de tensão, a malha aberta (na ordem de centenas de milhares) e a baixa impedância de saída (abaixo de 100 Ω).
( ) Um parâmetro de especificação de um AO é o SLEW-RATE (Taxa de subida).
( ) Na análise dos circuitos que fazem uso de amplificadores operacionais, pode-se considerar que as correntes de entrada, presentes nas entradas inversora e não-inversora, são nulas.
( ) A configuração “Amplificador Inversor” apresenta ganho de tensão controlável e finito à malha fechada com a manutenção da fase entre os sinais de entrada e saída.
( ) O circuito seguidor de emissor com uso de AO possui ganho unitário e define a tensão de saída com inversão de fase em relação à tensão de entrada.
Assinale a alternativa que contém a sequência CORRETA da classificação de cima para baixo.
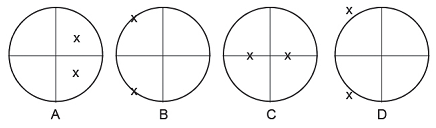
Dadas as distribuições de polos no plano Z para sistemas em Malha Aberta, conclua sobre a resposta temporal e a estabilidade dos sistemas em Malha Fechada.
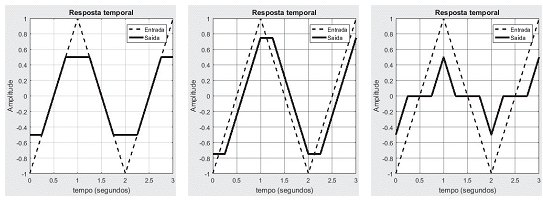
Levando em consideração as respostas ao degrau de três sistemas apresentadas a seguir, identifique as não-linearidades relacionadas.
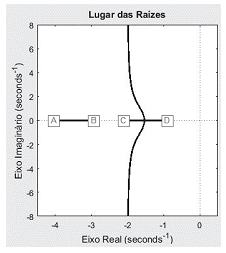
De acordo com o Lugar Geométrico das Raízes apresentado na figura a seguir, identifique os tipos das raízes presentes no sistema.
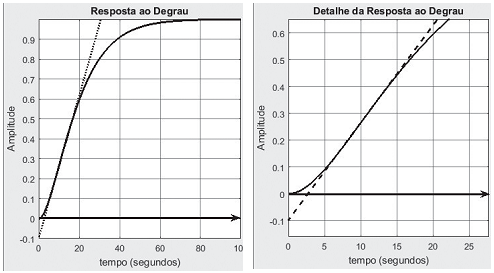
Segundo a Resposta ao Degrau em Malha Aberta de um sistema de primeira ordem com atraso, determine os parâmetros de um controlador PID utilizando o método de Ziegler-Nichols (Kp = 1,2/A, Ti = 2L, Td = L/2).
Dada a distribuição de polos de um sistema em Malha Aberta mostrada na figura a seguir, conclua sobre a estabilidade do sistema em Malha Fechada.
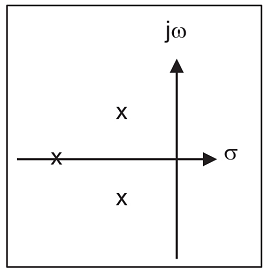
De acordo com a figura abaixo, é CORRETO afirmar:
Com referência à rugosidade e tolerâncias geométricas da peça abaixo, assinale a afirmativa CORRETA.
Assinale a alternativa INCORRETA em relação aos TERMOPARES.
Em relação ao protocolo de comunicação Modbus RTU (Remote Terminal Unit, ou Unidade Terminal Remota), assinale a alternativa INCORRETA.
A norma IEC 61131 define que para um CLP - Controlador Lógico Programável estar de acordo com os padrões por ela estabelecidos, deve possuir ao menos duas linguagens gráficas e duas linguagens de texto para sua programação. Assinale a alternativa que possui uma linguagem de programação não padronizada.
Em 1992, a International Electrotechnical Commission (IEC — Comissão Internacional de Eletrotécnica) publicou a primeira edição da norma IEC 61131, com o objetivo de estabelecer padrões para os controladores programáveis. Essa norma foi dividida em vários capítulos, possibilitando a definição de critérios para cada um dos tópicos relacionados aos CLPs. Assinale a alternativa CORRETA em relação aos conteúdos dessa norma.
I. Os principais componentes desse sistema são: motor, cilindro, bomba de óleo, válvula e tanque de óleo. A bomba de óleo é responsável pelo fluxo de óleo no cilindro em direção ao pistão que movimenta a junta. II. É geralmente associado a robôs de maior porte, quando comparados aos acionadores pneumáticos e elétricos. Entretanto, a precisão em relação aos acionadores elétricos é menor. III. Existem diversos tipos diferentes de motores hidráulicos, como motor de palheta, de engrenagem, de lóbulos etc., e todos eles apresentam características de alto torque específico, ou seja, torque elevado com massa e volume reduzidos.
É correto o que se afirma em
( ) Elementos compridos e esbeltos sujeitos a uma força axial de compressão são chamados de flambagem e a deflexão lateral que sofrem é chamada de coluna.
( ) A carga axial máxima que uma coluna pode suportar e que está na iminência de sofrer flambagem é denominada carga crítica.
( ) Com muita frequência, a flambagem de uma coluna pode resultar em uma falha repentina e dramática de uma estrutura ou mecanismo e, por isso, é preciso dedicar especial atenção ao projeto de colunas para que estas possam suportar com segurança as cargas pretendidas sem sofrer flambagem.