Questões de Concurso Sobre engenharia mecatrônica
Foram encontradas 238 questões
Sobre a notação de Denavit-Hartenberg (D-H), analise as assertivas abaixo.
I. Denavit e Hartenberg propuseram uma notação sistemática para atribuir um sistema de coordenadas ortonormal com a regra da mão direita, um para cada elo, em uma cadeia cinemática aberta de elos.
II. Este método conduz a uma representação baseada em transformações heterogêneas, que exprimem cada referencial em relação ao referencial anterior.
III. Na representação D-H original, associa-se o eixo de junta ao eixo z e cada matriz é representada pelo produto de quatro transformações básicas envolvendo rotações e translações.
É correto o que se afirma em
Sobre entropia e o segundo princípio da termodinâmica, analise as assertivas abaixo.
I. Se o processo é irreversível, a entropia de um sistema fechado sempre diminui. No entanto, se o processo for reversível, seria possível reverter o processo recolocando esferas no pistão e, para que a temperatura não aumente, o gás cede calor para o reservatório, e a entropia aumenta. Nesse caso, o sistema não é fechado.
II. Se o reservatório fizer parte do sistema, juntamente com o gás, ter-se-á um sistema fechado. Durante a reversão do processo, a energia, na forma de calor, é transferida para o reservatório, ou seja, de uma parte do sistema para outro, dentro do sistema.
III. Em uma máquina ideal, todos os processos são reversíveis e não ocorrem desperdícios nas transferências de energia em virtude, diz-se, do atrito e da turbulência.
É correto o que se afirma em
( ) É também conhecida como irradiação, é uma forma de transferência de calor que ocorre por meio de ondas eletromagnéticas.
( ) O movimento de energia radiante, no espaço, é semelhante à propagação da luz e pode ser descrito pela teoria das ondas. Quando as ondas de radiação encontram algum objeto, suas energias são absorvidas próximas à superfície.
( ) Todos os corpos emitem continuamente energia radiante. A intensidade das emissões depende da temperatura e da natureza da superfície. O calor radiante tem a velocidade da luz (300.000 km/s) e se assemelha à radiação da luz.
I. O calor e o trabalho são, ambos, fenômenos transitórios. Os sistemas nunca possuem calor ou trabalho, porém qualquer um deles ou, ambos, atravessam a fronteira do sistema, quando o sistema sofre uma mudança de estado. II. Tanto o calor quanto o trabalho são fenômenos de fronteira. Ambos são observados somente nas fronteiras do sistema, e ambos representam energia atravessando a fronteira do sistema. III. Tanto o calor quanto o trabalho não são funções de linha.
É correto o que se afirma em
I. É um circuito digital que possui duas entradas e uma única saída e é capaz de armazenar um bit de informação. II. As duas entradas não são intercambiáveis: uma é reservada ao sinal de controle (relógio) e a outra recebe o dado (bit) a ser armazenado. III. Desde que devidamente alimentado com energia, um flip-flop pode manter indefinidamente um estado, até que os sinais de entrada assumam uma configuração tal que o façam mudar de estado.
É correto o que se afirma em
Sobre a deformação elástica dos metais, analise as assertivas abaixo.
I. Quando uma pequena tensão de tração é aplicada a um pedaço de metal ou, de uma maneira geral, a um material cristalino qualquer, ocorre a deformação elástica.
II. O módulo de elasticidade de todos os materiais decresce com o aumento da temperatura.
III. Os materiais são isotrópicos em relação ao módulo de elasticidade.
É correto o que se afirma em
Observe a figura abaixo.
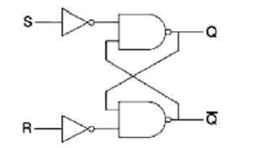
Dos tipos de flip-flops, o circuito representado na figura representa o tipo
“Caracterizam-se pela pequena área de trabalho, pelo elevado grau de rigidez mecânica e pela grande exatidão na localização do atuador. Seu controle é simples em razão do movimento linear dos vínculos e de o momento de inércia da carga ser fixo em toda a área de atuação”.