Questões de Concurso Comentadas por alunos sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 87 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Considere as informações a seguir para responder à questão.
O controle de atitude de um satélite em órbita consiste em ajustar, automaticamente, o ângulo de seu eixo, de modo a direcionar sua antena para a região desejada na superfície da Terra. O modelo simplificado desse sistema consta de um sinal de entrada, que é o torque τ(t), e de um sinal de saída, que é o ângulo θ(t). Considerando o vetor de estado X(t)=  definido com x1(t) =
definido com x1(t) =  (t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
(t) , posição angular e x2(t) = (t) = dθ / dt , a velocidade angular, obtém-se o seguinte modelo em espaço de estado.
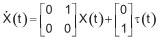 e y(t) = [1,0] x(t)
e y(t) = [1,0] x(t)
Aplicando uma realimentação de estado, com a lei de controle dada por τ(t)= - KX(t)= -[k1 k2] X(t), o valor do vetor de ganhos K, que conduz os polos em malha fechada para as posições -2 e -3, é

utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
 em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada. utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.