Questões de Concurso
Foram encontradas 364 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2018
Banca:
FGV
Órgão:
COMPESA
Prova:
FGV - 2018 - COMPESA - Analista de Saneamento - Engenheiro Eletrônico |
Q919415
Engenharia Eletrônica
Considere o gráfico de resposta em frequência de uma função de
transferência H(s).
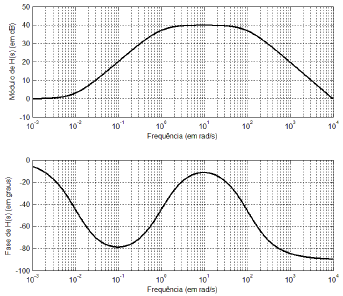
A partir da análise do gráfico, conclui-se que H(s)
A partir da análise do gráfico, conclui-se que H(s)
Ano: 2018
Banca:
FGV
Órgão:
COMPESA
Prova:
FGV - 2018 - COMPESA - Analista de Saneamento - Engenheiro Eletrônico |
Q919414
Engenharia Eletrônica
O controlador PID é muito utilizado na indústria devido à sua
capacidade de controlar adequadamente a dinâmica de uma
grande variedade de processos industriais, mesmo possuindo
uma estrutura de controle relativamente simples.
O diagrama a seguir apresenta uma variante desse tipo de controlador, denominado aqui controlador modificado, a partir da modificação na estrutura clássica PID, onde:
• G(s) é a função de transferência de planta; • r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente; • KP, TI e TD são os parâmetros do controlador modificado.
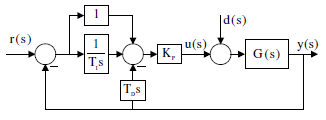
Uma das diferenças entre o controlador modificado e o controlador PID clássico é a capacidade que aquele tem de
O diagrama a seguir apresenta uma variante desse tipo de controlador, denominado aqui controlador modificado, a partir da modificação na estrutura clássica PID, onde:
• G(s) é a função de transferência de planta; • r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente; • KP, TI e TD são os parâmetros do controlador modificado.
Uma das diferenças entre o controlador modificado e o controlador PID clássico é a capacidade que aquele tem de
Ano: 2018
Banca:
FGV
Órgão:
COMPESA
Prova:
FGV - 2018 - COMPESA - Analista de Saneamento - Engenheiro Eletrônico |
Q919413
Engenharia Eletrônica
Considere a resposta ao degrau unitário de um sistema dinâmico,
cuja função de transferência é dada por G(s) = 
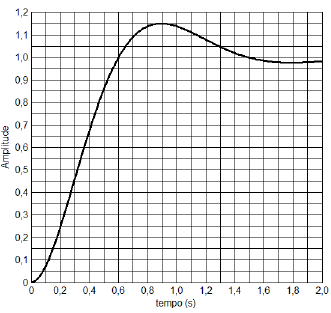
A partir da análise do gráfico, conclui-se que a resposta do
sistema apresenta
Ano: 2018
Banca:
FGV
Órgão:
COMPESA
Prova:
FGV - 2018 - COMPESA - Analista de Saneamento - Engenheiro Eletrônico |
Q919412
Engenharia Eletrônica
A figura a seguir apresenta o diagrama em blocos de um sistema
de controle de malha fechada.
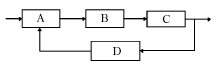
Os blocos A, B, C e D são, respectivamente, denominados de
Os blocos A, B, C e D são, respectivamente, denominados de
Ano: 2017
Banca:
FADESP
Órgão:
COSANPA
Prova:
FADESP - 2017 - COSANPA - Engenheiro de Controle e Automação |
Q906029
Engenharia Eletrônica
A transformada de Laplace da função temporal dada abaixo é
ƒ(t) = e-t cos(100t)