Questões de Concurso Comentadas por alunos sobre controladores (proporcional, pi e pid) em engenharia eletrônica
Foram encontradas 87 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2023
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2023 - Transpetro - Técnico de Manutenção - Elétrica |
Q2320601
Engenharia Eletrônica
Um Sistema de Controle Linear, na configuração de Malha
Fechada com realimentação de saída, apresenta, como
modelo, a seguinte Função de Transferência de Malha
Fechada em função do ganho proporcional de malha K.
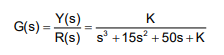
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?
Q1755032
Engenharia Eletrônica
Analise os Sistemas Dinâmicos a seguir.
SISTEMA I: 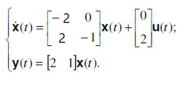
SISTEMA II: 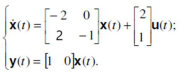
Sobre a controlabilidade e a observalidade desses sistemas, é correto afirmar que são, respectivamente,
Ano: 2021
Banca:
OMNI
Órgão:
Prefeitura de Santana do Livramento - RS
Prova:
OMNI - 2021 - Prefeitura de Santana do Livramento - RS - Engenheiro Mecânico |
Q1714481
Engenharia Eletrônica
Valor desejado estabelecido, previamente, como
referência de ponto de controle no qual o valor
controlado deve permanecer:
Ano: 2021
Banca:
CESPE / CEBRASPE
Órgão:
CODEVASF
Prova:
CESPE / CEBRASPE - 2021 - CODEVASF - Analista em Desenvolvimento Regional - Engenharia Elétrica |
Q1678109
Engenharia Eletrônica

Considere que o projetista de um sistema que precise ser controlado tenha como opções os controladores apresentados na figura antecedente. A partir dessas informações, julgue o item.
O baixo custo é uma das vantagens do controlador 1, que pode ser amplamente utilizado tanto em sistemas de controle industriais quanto domésticos.
O baixo custo é uma das vantagens do controlador 1, que pode ser amplamente utilizado tanto em sistemas de controle industriais quanto domésticos.
Ano: 2021
Banca:
CESPE / CEBRASPE
Órgão:
CODEVASF
Prova:
CESPE / CEBRASPE - 2021 - CODEVASF - Analista em Desenvolvimento Regional - Engenharia Elétrica |
Q1678108
Engenharia Eletrônica
Considere que o projetista de um sistema que precise ser controlado tenha como opções os controladores apresentados na figura antecedente. A partir dessas informações, julgue o item.
A ação de controle do controlador 2 é denominada controle de taxa, visto que é proporcional à taxa de variação do sinal de erro atuante.
A ação de controle do controlador 2 é denominada controle de taxa, visto que é proporcional à taxa de variação do sinal de erro atuante.