Questões Militares
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 69 questões
Observe o gráfico abaixo.
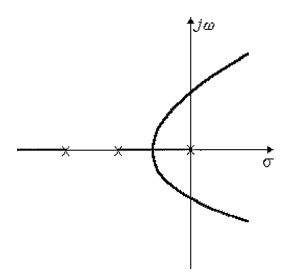
Esse gráfico apresenta o lugar das raízes de um sistema linear
realimentado com um ganho que pode ser ajustado. Com
relação a esse gráfico pode-se afirmar que
Sabendo que:  qual é a transformada Z de
qual é a transformada Z de 
Considere um sistema linear de 2ª ordem cuja função de transferência é dada por 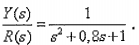 Quanto ao comportamento dinâmico, pode-se afirmar que a resposta do sistema a uma entrada degrau é
Quanto ao comportamento dinâmico, pode-se afirmar que a resposta do sistema a uma entrada degrau é
Analise a figura a seguir.
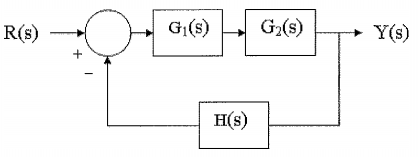
Considerando o diagrama de blocos representado na figura acima, qual das opções abaixo apresenta a função de transferência Y (s ) / R(s)?
Dados: G1(s) = 1/s,
G2(s) = 1/ (s + 1) ; e
H (s) = 4
Analise as afirmativas a seguir a respeito dos controladores PID.
I - As regras de sintonia de Ziegler Nichols não são convenientes quando o modelo matemático do sistema é desconhecido .
II - Os controladores PID propiciam controle satisfatório para processos contínuos, porém podem não fornecer o controle ótimo em muitas situações específicas.
III- Os controladores PID não podem ser dotados de capacidade de sintonia automática (on line) .
Assinale a opção correta
Considere o sistema apresentado a seguir.
Assinale a opção que apresenta as representações no espaço
de estados sob a forma canônica controlável.
Considere o diagrama de blocos apresentado a seguir.

Considere a equação não linear apresentada a seguir.
Assinale a opção que apresenta a equação linearizada na região 5 ≤ x ≤ 7 10 ≤ y ≤ 12.
Analise as seguintes afirmativas em relação à estabilidade de sistemas de controle lineares e invariantes no tempo.
I - Um sistema é estável se a saída retorna ao seu estado de equilíbrio quando o sistema é submetido a uma condição inicial.
II - Se os valores de saída de um sistema em regime estacionário não coincidem exatamente com os do sinal de entrada, diz-se que o sistema apresenta erro estacionáio .
III- Um sistema é criticamente estável se o sinal de saída apresenta oscilações que se conservam indefinidamente.
Assinale a opção correta.
Coloque F (falso) ou V (verdadeiro) nas afirmativas abaixo, em relação à analise de estabilidade segundo Liapunov, assinalando a seguir a opção correta.
( ) Estabilidade assintótica é um conceito local, que pode não significar que um sistema se comporte adequadamente.
( ) O primeiro método de Liapunov consiste em todos os procedimentos nos quais a forma explícita da solução das equações diferenciais é utilizada para análise.
( ) O segundo método de Liapunov requer a solução de equações diferenciais para se determinar a estabilidade de um sistema.
( ) 0 segundo método de Liapunov, quando aplicado em sistemas não-lineares, requer considerável experiência e inventividade .
Considere o sistema apresentado a seguir.

Considere o sistema elétrico apresentado a seguir.

Considere o sistema de controle apresentado a seguir e os seus respectivos diagramas de Bode em malha aberta com K = 10.


Simplificando-se o diagrama de blocos acima, assinale a opção que apresenta a função resultante [C (s) /R (s) ] .

f(t) = sen(wt) para t > 0
Assinale a opção que apresenta a transformada z da função f(t).
