Questões Militares
Sobre análise e controle de sistemas em engenharia de automação
Foram encontradas 69 questões
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251558
Engenharia de Automação
Considere o sistema representado a seguir em equações de espaço de estado.

Onde:
u(t) = entrada do sistema
y(t) = saída do sistema
x1(t) e x2 (t) = variáveis de estado
Assinale a opção que apresenta a função de transferência do sistema acima.
Onde:
u(t) = entrada do sistema
y(t) = saída do sistema
x1(t) e x2 (t) = variáveis de estado
Assinale a opção que apresenta a função de transferência do sistema acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251557
Engenharia de Automação
Dada a função f definida pot f(x) = x2 + 4x - 4, é correto afirmar que f(2) é igual a:
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251556
Engenharia de Automação
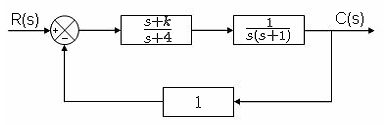
Analise o sistema apresentado a seguir.
O sistema acima
O sistema acima
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251553
Engenharia de Automação
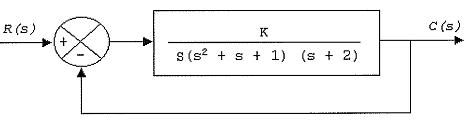
Considere um sistema cuja função de transferência em malha aberta é apresentada a seguir.

Assinale a opção correta referente à estabilidade do sistema acima.
Assinale a opção correta referente à estabilidade do sistema acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251552
Engenharia de Automação
Considere o sistema de equações apresentado a seguir.
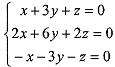
Assinale a opção que apresenta as soluções básicas obtidas ao resolver o sistema acima.
Assinale a opção que apresenta as soluções básicas obtidas ao resolver o sistema acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251550
Engenharia de Automação
Considere os sistemas (1) e (2) apresentados a seguir.
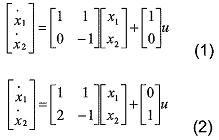
Em relação ao sistema acima, assinale a opção correta.
Em relação ao sistema acima, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251549
Engenharia de Automação
Assinale a opção que completa corretamente as lacunas das sentenças abaixo.
A adição de um polo à função de transferência em malha aberta tem por efeito puxar o lugar das raízes para a ...................... , tendendo a tornar o sistema mais e a acomodação da resposta mais .................... . A adição de um zero à função de transferência em malha aberta tem por objetivo puxar o lugar das raízes para a ................... , tendendo a tornar o sistema mais ................ e a acomodação da resposta mais .................... .
A adição de um polo à função de transferência em malha aberta tem por efeito puxar o lugar das raízes para a ...................... , tendendo a tornar o sistema mais e a acomodação da resposta mais .................... . A adição de um zero à função de transferência em malha aberta tem por objetivo puxar o lugar das raízes para a ................... , tendendo a tornar o sistema mais ................ e a acomodação da resposta mais .................... .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251545
Engenharia de Automação
Considere a transformada z (Y (z) ) apresentada a seguir.

Sendo a, k e T constantes e k = 1, 2, ..., assinale a opção que apresenta a transformada z inversa y (kT) da função acima.
Sendo a, k e T constantes e k = 1, 2, ..., assinale a opção que apresenta a transformada z inversa y (kT) da função acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251543
Engenharia de Automação
Observe as figuras 1 e 2 a seguir.
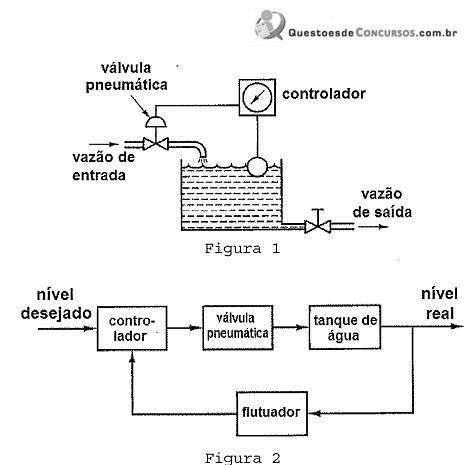
A Figura 1 refere-se ao diagrama esquemático de um sistema de controle de nível. O controlador automático mantém o nível do líquido, comparando o nível. real com o nível desejado e corrigindo qualquer erro eventual através do ajuste da abertura da válvula pneumática. A figura 2 é um diagrama de blocos deste sistema de controle.
Em relação a um sistema de controle de nível controlado por um operador humano, é correto afirmar que os olhos, o cérebro e os músculos correspondem, respectivamente,
A Figura 1 refere-se ao diagrama esquemático de um sistema de controle de nível. O controlador automático mantém o nível do líquido, comparando o nível. real com o nível desejado e corrigindo qualquer erro eventual através do ajuste da abertura da válvula pneumática. A figura 2 é um diagrama de blocos deste sistema de controle.
Em relação a um sistema de controle de nível controlado por um operador humano, é correto afirmar que os olhos, o cérebro e os músculos correspondem, respectivamente,
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251541
Engenharia de Automação
Em relação à resposta de frequência de sistema de controle, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251540
Engenharia de Automação
Considere o sistema mecânico apresentado a seguir.
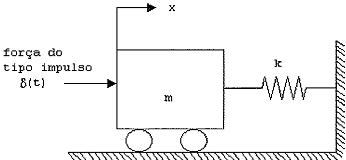
onde :
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso
[ x(0)=0, (0)=0] e que, no instante t=0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta o modelo matemático deste sistema.
(0)=0] e que, no instante t=0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta o modelo matemático deste sistema.
onde :
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso
[ x(0)=0,
(0)=0] e que, no instante t=0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta o modelo matemático deste sistema.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251539
Engenharia de Automação
Considere a equação diferencial apresentada a seguir.

Submetendo a equação às seguintes condições iniciais: x(0) = a e x = b , e sendo a e b constantes, assinale a opção que apresenta o resultado x(t) para o cálculo desta equação diferencial para t 0.
Submetendo a equação às seguintes condições iniciais: x(0) = a e x = b , e sendo a e b constantes, assinale a opção que apresenta o resultado x(t) para o cálculo desta equação diferencial para t 0.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251538
Engenharia de Automação
Em relação aos conceitos de controbabilidade e observalidade, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251536
Engenharia de Automação
Considere o sistema de controle apresentado a seguir.
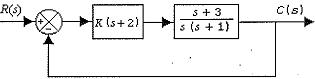
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente o valor do ganho K nos pontos de partida e de chegada, respectivamente.
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente o valor do ganho K nos pontos de partida e de chegada, respectivamente.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251531
Engenharia de Automação
Calculef(3x+ 3)dx e assinale a opção que apresenta a resposta correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251525
Engenharia de Automação
Considere o sistema de controle apresentado a seguir.
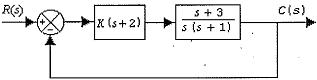
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente, e respectivamente, os pontos de partida e de chegada desse sistema.
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente, e respectivamente, os pontos de partida e de chegada desse sistema.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251522
Engenharia de Automação
Considere o sistema mecânico apresentado a seguir.

Onde:
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso {x(0)= 0, x(0)= 0] e que, no instante t= 0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta a resposta deste sistema em função do tempo (Y (t) ) , quando submetido ao impulso unitário de força.
Onde:
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso {x(0)= 0, x(0)= 0] e que, no instante t= 0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta a resposta deste sistema em função do tempo (Y (t) ) , quando submetido ao impulso unitário de força.
Ano: 2010
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2010 - CIAAR - Primeiro Tenente - Engenharia Eletrônica |
Q660838
Engenharia de Automação
Leia a afirmação abaixo e assinale a alternativa que preenche as lacunas correta e respectivamente.
A teoria de controle moderno contrasta com a teoria de controle convencional porque a primeira é
aplicada a sistemas de entrada(s) e saída(s) ______________, que _______________, enquanto que a
última é aplicável a sistemas _______________, de entrada(s) e saída(s) _______________.
Ano: 2010
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2010 - CIAAR - Primeiro Tenente - Engenharia Eletrônica |
Q660837
Engenharia de Automação
Dada a função de transferência de malha fechada de um sistema de controle linear, determinar os limites do parâmetro de projeto k que conduzem à estabilidade.
Ano: 2010
Banca:
Aeronáutica
Órgão:
CIAAR
Prova:
Aeronáutica - 2010 - CIAAR - Primeiro Tenente - Engenharia Eletrônica |
Q660836
Engenharia de Automação
Assinale a alternativa que apresenta a afirmação correta quanto à estabilidade de sistemas de
controle.