Questões Militares Sobre engenharia de automação
Foram encontradas 167 questões
Observe a figura abaixo.
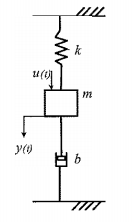
Essa figura representa um sistema mecânico linear formado
por um corpo de massa m = 1kg, uma mola de constante
k = 4N/m e um amortecedor com constante de amortecimento
elástica b = 1 Ns/m. Assinale a opção que apresenta as matrizes
A e B da equação de estados x=Ax + Bu do sistema que
representa o deslocamento Y ( s ) , em função da força aplicada
U(s) .
Observe o diagrama de Veitch-Karnaugh abaixo.
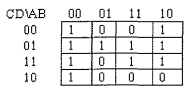
Qual das opções apresenta a expressão booleana minimizada
por esse diagrama?
Considere que um sistema com realimentação NEGATIVA unitária
possui uma função de transferência de malha aberta dada por  . Sabe-se que para t ≥ 0, a resposta a um degrau unitário em malha fechada é dada por y ( t ) = 1 + te-t - e-t . Assinale a opção que apresenta a resposta a um impulso unitário desse sistema em malha fechada.
. Sabe-se que para t ≥ 0, a resposta a um degrau unitário em malha fechada é dada por y ( t ) = 1 + te-t - e-t . Assinale a opção que apresenta a resposta a um impulso unitário desse sistema em malha fechada.
Considere o sistema de controle a seguir. 
Assinale a opção que completa corretamente as lacunas da sentença abaixo.
Com relação ao sistema acima, sabendo que a transformada Z
da função de transferência em malha aberta G(S) é 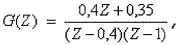 é correto afirmar que as raízes da equação
característica são ___________ e que o sistema é ___________ quando o ganho K for igual a 1.
é correto afirmar que as raízes da equação
característica são ___________ e que o sistema é ___________ quando o ganho K for igual a 1.
Considere um sistema linear cuja função de transferência é dada por  . Assinale a opção que apresenta o erro da saída c (t) para uma entrada r(t) = t, quando o tempo tende a
infinito.
. Assinale a opção que apresenta o erro da saída c (t) para uma entrada r(t) = t, quando o tempo tende a
infinito.
Observe o gráfico abaixo.
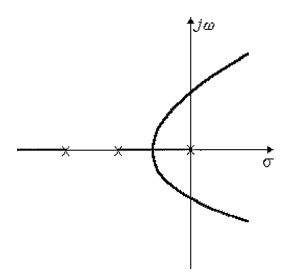
Esse gráfico apresenta o lugar das raízes de um sistema linear
realimentado com um ganho que pode ser ajustado. Com
relação a esse gráfico pode-se afirmar que
Sabendo que:  qual é a transformada Z de
qual é a transformada Z de 
Considere um sistema linear de 2ª ordem cuja função de transferência é dada por 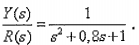 Quanto ao comportamento dinâmico, pode-se afirmar que a resposta do sistema a uma entrada degrau é
Quanto ao comportamento dinâmico, pode-se afirmar que a resposta do sistema a uma entrada degrau é
Analise a figura a seguir.
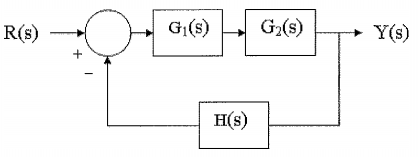
Considerando o diagrama de blocos representado na figura acima, qual das opções abaixo apresenta a função de transferência Y (s ) / R(s)?
Dados: G1(s) = 1/s,
G2(s) = 1/ (s + 1) ; e
H (s) = 4
Observe a figura a seguir.
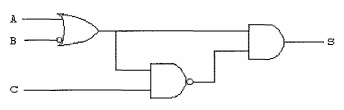
Qual a expressão lógica de "S" em função de "A", "B" e "C",
na figura acima?
Analise o circuito com amplificador operacional ideal da figura
a seguir.

Qual o valor da tensão de saída, Vout, desse circuito?
Analise a figura a seguir.
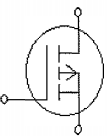
O símbolo esquemático apresentado acima trata-se de um transistor
MOSFET
Considere a equação característica apresentada a seguir.
s4 +Ks3 + s2 + s+ 1 = 0
Com base nessa equação e utilizando o critério de Routh, é
correto afirmar que o sistema é
Analise a figura a seguir.
