Questões Militares Sobre engenharia de automação
Foram encontradas 167 questões
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641369
Engenharia de Automação
Assinale a opção que somente apresenta componentes construtivos
de um robô industrial.
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641368
Engenharia de Automação
De acordo com a Federação Internacional de Robótica (IFR),
assinale a opção que NÃO apresenta uma configuração básica
de robô, quanto à estrutura mecânica.
Ano: 2012
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2012 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q641367
Engenharia de Automação
Com relação às especificações de desempenho no domínio do
tempo de sistemas de controle, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251568
Engenharia de Automação
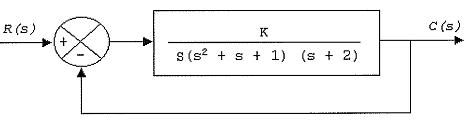
Considere o diagrama de blocos apresentado a seguir.

Simplificando-se o diagrama de blocos acima, assinale a opção que apresenta a função resultante [C (s) /R (s) ] .
Simplificando-se o diagrama de blocos acima, assinale a opção que apresenta a função resultante [C (s) /R (s) ] .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251567
Engenharia de Automação

Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251566
Engenharia de Automação
Em relação aos tipos de sistemas de controle, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251565
Engenharia de Automação
Determine a derivada de f se f(x) = 3x2 + 24 e assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251564
Engenharia de Automação

Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251563
Engenharia de Automação
Em relação à programação de robôs industriais, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251562
Engenharia de Automação
Analise as seguintes afirmativas a respeito do controle liga-desliga (on-off).
I - O controle de duas posições é relativamente simples e barato e, por esta razão, extremamente utilizado tanto em sistemas de controle industriais como em sistemas de controle domésticos.
II - Considere-se u(t) o sinal de saída do controlador e e(t) o sinal de erro atuante. Em um controle de duas posições, o sinal u(t)sempre permanece igual a um valor máximo, independente do sinal de erro atuante ser positivo ou negativo.
III- Em um sistema de controle de duas posições, o elemento atuante possui apenas duas posições fixas que são, em muitos casos, simplesmente "ligado" ou "deligado" .
Assinale a opção correta.
I - O controle de duas posições é relativamente simples e barato e, por esta razão, extremamente utilizado tanto em sistemas de controle industriais como em sistemas de controle domésticos.
II - Considere-se u(t) o sinal de saída do controlador e e(t) o sinal de erro atuante. Em um controle de duas posições, o sinal u(t)sempre permanece igual a um valor máximo, independente do sinal de erro atuante ser positivo ou negativo.
III- Em um sistema de controle de duas posições, o elemento atuante possui apenas duas posições fixas que são, em muitos casos, simplesmente "ligado" ou "deligado" .
Assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251561
Engenharia de Automação
Analise a função apresentada a seguir.
f(t) = sen(wt) para t > 0
Assinale a opção que apresenta a transformada z da função f(t).

f(t) = sen(wt) para t > 0
Assinale a opção que apresenta a transformada z da função f(t).
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251560
Engenharia de Automação
Em relação às propriedades das matrizes e dos determinantes, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251559
Engenharia de Automação
Observe a seguinte figura.
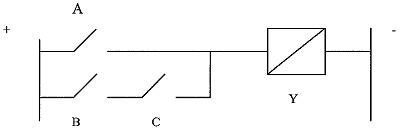
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.
Na linguagem LADDER, cada contato, ao assumir dois estados, representa uma variável booleana.
Assinale a opção que apresenta a expressão booleana que representa o circuito acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251558
Engenharia de Automação
Considere o sistema representado a seguir em equações de espaço de estado.

Onde:
u(t) = entrada do sistema
y(t) = saída do sistema
x1(t) e x2 (t) = variáveis de estado
Assinale a opção que apresenta a função de transferência do sistema acima.
Onde:
u(t) = entrada do sistema
y(t) = saída do sistema
x1(t) e x2 (t) = variáveis de estado
Assinale a opção que apresenta a função de transferência do sistema acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251557
Engenharia de Automação
Dada a função f definida pot f(x) = x2 + 4x - 4, é correto afirmar que f(2) é igual a:
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251556
Engenharia de Automação
Analise o sistema apresentado a seguir.
O sistema acima
O sistema acima
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251555
Engenharia de Automação
Considere a matriz B apresentada a seguir.
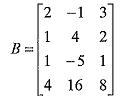
Assinale a opção que apresenta, respectivamente, o valor correspondente ao posto e à nulidade desta matriz.
Assinale a opção que apresenta, respectivamente, o valor correspondente ao posto e à nulidade desta matriz.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251554
Engenharia de Automação
Analise o circuito a seguir.
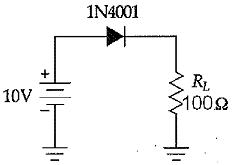
No circuito acima, considerando o diodo de silício, temperatura ambiente e
RL = 100 ohms, qual será a corrente na carga usando a segunda aproximação do diodo?
No circuito acima, considerando o diodo de silício, temperatura ambiente e
RL = 100 ohms, qual será a corrente na carga usando a segunda aproximação do diodo?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251553
Engenharia de Automação
Considere um sistema cuja função de transferência em malha aberta é apresentada a seguir.

Assinale a opção correta referente à estabilidade do sistema acima.
Assinale a opção correta referente à estabilidade do sistema acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251552
Engenharia de Automação
Considere o sistema de equações apresentado a seguir.
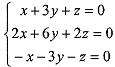
Assinale a opção que apresenta as soluções básicas obtidas ao resolver o sistema acima.
Assinale a opção que apresenta as soluções básicas obtidas ao resolver o sistema acima.