Questões Militares Sobre engenharia de automação
Foram encontradas 167 questões
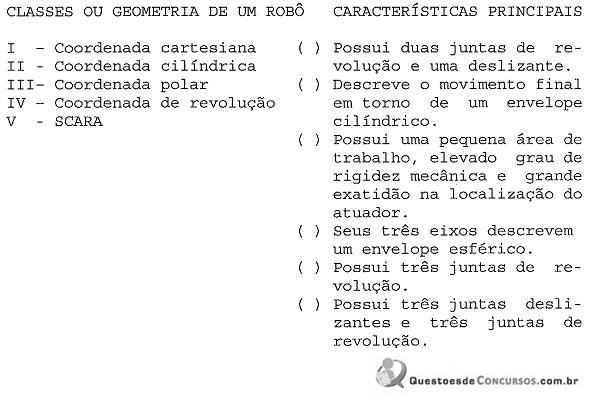
( ) A flexibilidade é um dos objetivos de um projeto de robotização.
( ) Dentre as três estratégias básicas de fabricação - manual, sistemas flexíveis e automação rígida -, somente o custo unitário de cada estratégia deve ser considerado na escolha da mais adequada.
( ) A especificação do método de programação é uma consideração técnica que deve ser analisada por ocasião da escolha do robô.
( ) Na análise de viabilidade econômica de um projeto de robotização, deve-se considerar que um robô não proporciona flexibilidade para atender às mudanças de mercado.
( ) O melhor arranjo físico para um robô industrial considera apenas as distâncias dos movimentos relacionados ao cumprimento da tarefa.
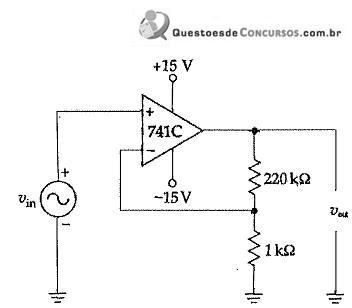
Qual o ganho de tensão do circuito acima?
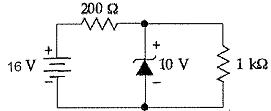
No circuito acima, qual a corrente no resistor de 1kΩ , considerando o diodo zener ideal?
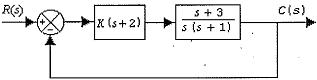
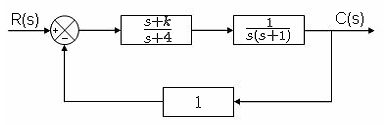
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente, e respectivamente, os pontos de partida e de chegada desse sistema.

Onde:
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso {x(0)= 0, x(0)= 0] e que, no instante t= 0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta a resposta deste sistema em função do tempo (Y (t) ) , quando submetido ao impulso unitário de força.
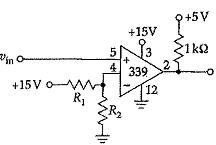
No circuito comparador da figura acima, qual a tensão de referência, considerando R1 = 20kΩ e R2 = 4kΩ?
Leia a afirmação abaixo e assinale a alternativa que preenche as lacunas correta e respectivamente.
A teoria de controle moderno contrasta com a teoria de controle convencional porque a primeira é
aplicada a sistemas de entrada(s) e saída(s) ______________, que _______________, enquanto que a
última é aplicável a sistemas _______________, de entrada(s) e saída(s) _______________.
Dada a função de transferência de malha fechada de um sistema de controle linear, determinar os limites do parâmetro de projeto k que conduzem à estabilidade.
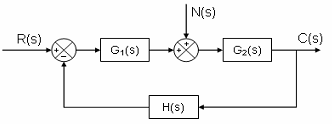
A seguir, encontra-se um diagrama de blocos de um sistema de controle linear submetido a uma perturbação N(s). Determinar a resposta C(s) do sistema devido à aplicação da entrada R(s) de referência e da perturbação N(s) simultaneamente.
Considerando o sistema de controle a seguir, em que ζ = 0,8 e ωn = 2rad/s, analise as afirmações abaixo, marque V para verdadeiro e F para falso e, em seguida, assinale a alternativa que apresenta a sequência correta. (Considerar π = 3,14).
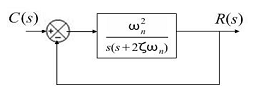
( ) Tempo de atraso é o tempo requerido para que a resposta alcance metade de seu valor final pela primeira vez.
( ) O tempo de pico é de aproximadamente 0,8 segundos.
( ) O tempo de acomodação para o critério de 5% é de aproximadamente 1,8 segundos.
( ) Tempo de subida é o tempo para que a resposta atinja o primeiro pico de sobressinal.
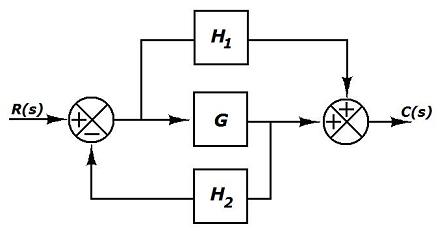
Assinale a alternativa que corresponde corretamente à função de transferência do diagrama abaixo.
Analise o diagrama de blocos a seguir, que representa um sistema linear e invariante no tempo.
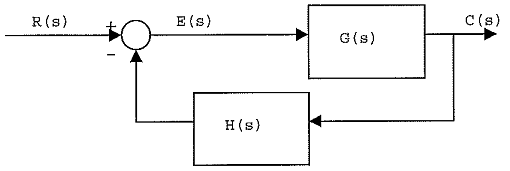
Considerando o diagrama de blocos acima, assinale a opção
que corresponde à fórmula que emprega o teorema do valor
final para calcular o erro de regime estacionário de um
sistema linear e invariante no tempo.