Questões Militares Sobre engenharia de automação
Foram encontradas 167 questões
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251551
Engenharia de Automação
Considere a transformação linear T: R3-→ R2 e as bases ß e β' apresentadas a seguir.
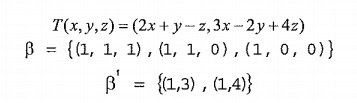
Assinale a opção que apresenta a matriz associada à transformação linear T em relação às bases ß e ß'.
associada à transformação linear T em relação às bases ß e ß'.
Assinale a opção que apresenta a matriz
associada à transformação linear T em relação às bases ß e ß'.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251550
Engenharia de Automação
Considere os sistemas (1) e (2) apresentados a seguir.
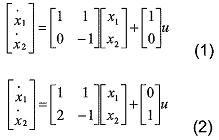
Em relação ao sistema acima, assinale a opção correta.
Em relação ao sistema acima, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251549
Engenharia de Automação
Assinale a opção que completa corretamente as lacunas das sentenças abaixo.
A adição de um polo à função de transferência em malha aberta tem por efeito puxar o lugar das raízes para a ...................... , tendendo a tornar o sistema mais e a acomodação da resposta mais .................... . A adição de um zero à função de transferência em malha aberta tem por objetivo puxar o lugar das raízes para a ................... , tendendo a tornar o sistema mais ................ e a acomodação da resposta mais .................... .
A adição de um polo à função de transferência em malha aberta tem por efeito puxar o lugar das raízes para a ...................... , tendendo a tornar o sistema mais e a acomodação da resposta mais .................... . A adição de um zero à função de transferência em malha aberta tem por objetivo puxar o lugar das raízes para a ................... , tendendo a tornar o sistema mais ................ e a acomodação da resposta mais .................... .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251548
Engenharia de Automação
Considere as matrizes A e B apresentadas a seguir.

Em relação às matrizes acima, é correto afirmar que os
Em relação às matrizes acima, é correto afirmar que os
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251547
Engenharia de Automação
Com relação às propriedades das matrizes, assinale a opção INCORRETA .
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251546
Engenharia de Automação
Analise o circuito a seguir.
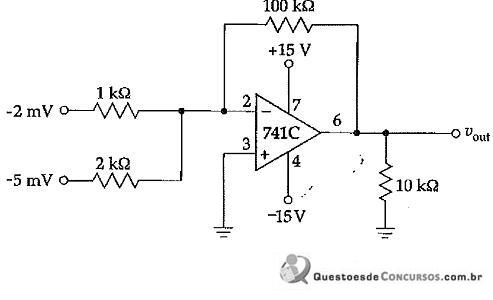
Qual a tensão de saída do circuito da figura acima?
Qual a tensão de saída do circuito da figura acima?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251545
Engenharia de Automação
Considere a transformada z (Y (z) ) apresentada a seguir.

Sendo a, k e T constantes e k = 1, 2, ..., assinale a opção que apresenta a transformada z inversa y (kT) da função acima.
Sendo a, k e T constantes e k = 1, 2, ..., assinale a opção que apresenta a transformada z inversa y (kT) da função acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251544
Engenharia de Automação
Observe a seguinte rede de Petri:
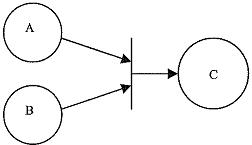
Assinale a opção que apresenta a expressão booleana correspondente à rede acima.
Assinale a opção que apresenta a expressão booleana correspondente à rede acima.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251543
Engenharia de Automação
Observe as figuras 1 e 2 a seguir.
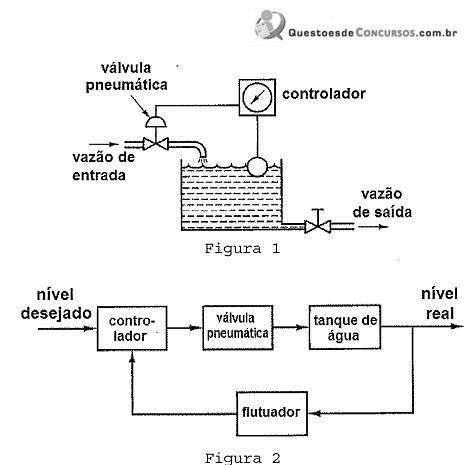
A Figura 1 refere-se ao diagrama esquemático de um sistema de controle de nível. O controlador automático mantém o nível do líquido, comparando o nível. real com o nível desejado e corrigindo qualquer erro eventual através do ajuste da abertura da válvula pneumática. A figura 2 é um diagrama de blocos deste sistema de controle.
Em relação a um sistema de controle de nível controlado por um operador humano, é correto afirmar que os olhos, o cérebro e os músculos correspondem, respectivamente,
A Figura 1 refere-se ao diagrama esquemático de um sistema de controle de nível. O controlador automático mantém o nível do líquido, comparando o nível. real com o nível desejado e corrigindo qualquer erro eventual através do ajuste da abertura da válvula pneumática. A figura 2 é um diagrama de blocos deste sistema de controle.
Em relação a um sistema de controle de nível controlado por um operador humano, é correto afirmar que os olhos, o cérebro e os músculos correspondem, respectivamente,
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251542
Engenharia de Automação
Um amplificador operacional ligado como seguidor de tensão tem ganho de tensão igual a:
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251541
Engenharia de Automação
Em relação à resposta de frequência de sistema de controle, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251540
Engenharia de Automação
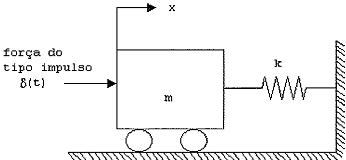
Considere o sistema mecânico apresentado a seguir.
onde :
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso
[ x(0)=0, (0)=0] e que, no instante t=0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta o modelo matemático deste sistema.
(0)=0] e que, no instante t=0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta o modelo matemático deste sistema.
onde :
m = massa do bloco
k = constante da mola
Supondo-se que o sistema acima esteja inicialmente em repouso
[ x(0)=0,
(0)=0] e que, no instante t=0, o sistema seja posto em movimento através de um impulso unitário de força, assinale a opção que apresenta o modelo matemático deste sistema.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251539
Engenharia de Automação
Considere a equação diferencial apresentada a seguir.

Submetendo a equação às seguintes condições iniciais: x(0) = a e x = b , e sendo a e b constantes, assinale a opção que apresenta o resultado x(t) para o cálculo desta equação diferencial para t 0.
Submetendo a equação às seguintes condições iniciais: x(0) = a e x = b , e sendo a e b constantes, assinale a opção que apresenta o resultado x(t) para o cálculo desta equação diferencial para t 0.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251538
Engenharia de Automação
Em relação aos conceitos de controbabilidade e observalidade, assinale a opção correta.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251537
Engenharia de Automação
Com relação à linguagem de diagrama de contatos ou linguagem LADDER, assinale a opção que apresenta a instrução disponível em qualquer tipo de controlador lógico programável.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251536
Engenharia de Automação
Considere o sistema de controle apresentado a seguir.
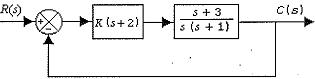
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente o valor do ganho K nos pontos de partida e de chegada, respectivamente.
Para a construção do lugar das raízes do sistema acima é preciso calcular os pontos de partida e de chegada. Assinale a opção que apresenta aproximadamente o valor do ganho K nos pontos de partida e de chegada, respectivamente.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251535
Engenharia de Automação
Analise a figura a seguir.
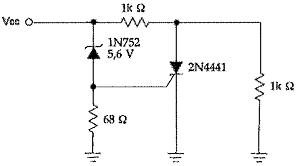
Na figura acima o 2N4441 tem uma tensão de disparo igual a 0,75V. Qual a tensão de alimentação Vcc necessária para que o SCR seja disparado?
Na figura acima o 2N4441 tem uma tensão de disparo igual a 0,75V. Qual a tensão de alimentação Vcc necessária para que o SCR seja disparado?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251534
Engenharia de Automação
Considere o oscilador tipo pêndulo de massa M e comprimento L apresentado a seguir.

Assinale a opção que apresenta uma aproximação linear do torque T, em função do ângulo θ, em torno do ponto de equilíbrio (θ= 0) , razoavelmente precisa para -π/4≤θ≤π/ 4.
Assinale a opção que apresenta uma aproximação linear do torque T, em função do ângulo θ, em torno do ponto de equilíbrio (θ= 0) , razoavelmente precisa para -π/4≤θ≤π/ 4.
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251533
Engenharia de Automação
Analise a figura a seguir.

Que expressão representa a tabela acima?
Que expressão representa a tabela acima?
Ano: 2011
Banca:
Marinha
Órgão:
Quadro Complementar
Prova:
Marinha - 2011 - Quadro Complementar - Segundo-Tenente - Engenharia - Controle e Automação |
Q251532
Engenharia de Automação
Analise o circuito a seguir.

Qual o valor de Vce no circuito representado pela figura acima, considerando que RC = 1000Ω, Vcc = 10V e a corrente no coletor Ic = 1mA?
Qual o valor de Vce no circuito representado pela figura acima, considerando que RC = 1000Ω, Vcc = 10V e a corrente no coletor Ic = 1mA?