Questões Militares
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 85 questões
Admitindo-se que PI corresponde à ação proporcional-integral, PD corresponde à ação proporcional-derivativo e que PID corresponde à ação proporcional-integral-derivativo, examine as afirmações a seguir sobre as ações de controle de processo PI, PD e PID.
I. Controle que elimina o erro de forma automática, gerando uma resposta transitória adequada pela ação proporcional.
II. Controle que combina a estabilidade com a eliminação de um erro em um único controlador; minimizando o sinal de erro pela ação proporcional, zerado pela ação integral e obtido em uma velocidade antecipada pela ação derivativa.
III. Controle que, na prática, não pode ser utilizado de forma isolada, mas quando combinado com outro tipo de controle, tem tendência de melhorar a estabilidade do sistema e reduzir o tempo de acomodação.
A sequência que apresenta corretamente as ações de controle é
Observe o diagrama de blocos de um sistema de controle industrial.
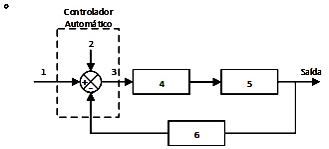
Os números indicados na figura acima correspondem à:
Um controlador proporcional-derivativo (PD) é sensibilizado por um desvio que se manifesta com uma velocidade de 20%/min.
Considerando VP > SV, ação direta; Kp =2; KD=0, 20 min e So= 45%, qual a saída do controlador 15 segundos após o início do desvio?
Associe as duas colunas relacionando campo elemento de controle com as suas respectivas definições.
Elementos de Controle
(1) Variável Controlada
(2) Variável Manipulada
(3) Sistema
(4) Distúrbios
(5) Controle com realimentação
Definições
( ) É a grandeza ou a condição modificada pelo controlador, de modo que afete o valor da variável controlada.
( ) É um sinal que tende a afetar de maneira adversa o valor da variável de saída de um sistema.
( ) É a grandeza ou condição que é medida.
( ) É a combinação de componentes que agem em conjunto para atingir um determinado objetivo.
( ) É uma operação que, na presença de distúrbios, tem como objetivo diminuir a diferença entre uma entrada pré-definida e a saída de um sistema.
A sequência correta dessa associação é
Microprocessadores e computadores estão cada vez mais presentes no dia a dia de muitas pessoas. A esse respeito, avalie as afirmações a seguir.
I. Microprocessador é um circuito digital sequencial projetado para obedecer uma sequência de instruções denominada programa.
II. O microprocessador se conecta à memória através de um grupo de linhas denominado barramento.
III. Arquiteturas Superescalares são constituídas de múltiplos processadores, com execução de instruções em pipelines sequenciais, com memória cache independente.
IV. Os computadores contém cinco unidades essenciais, as quais sejam unidade lógica e aritmética, unidade memória, unidade de controle, unidade de entrada e unidade de saída.
Acerca de microprocessadores e computadores apenas está correto o que afirma em
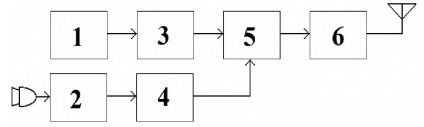
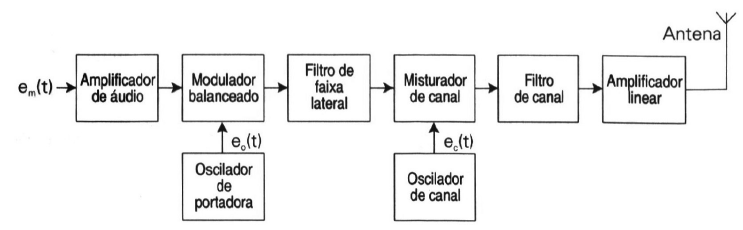
Analise a seguir o diagrama de blocos de um transmissor.
Analise a figura a seguir.
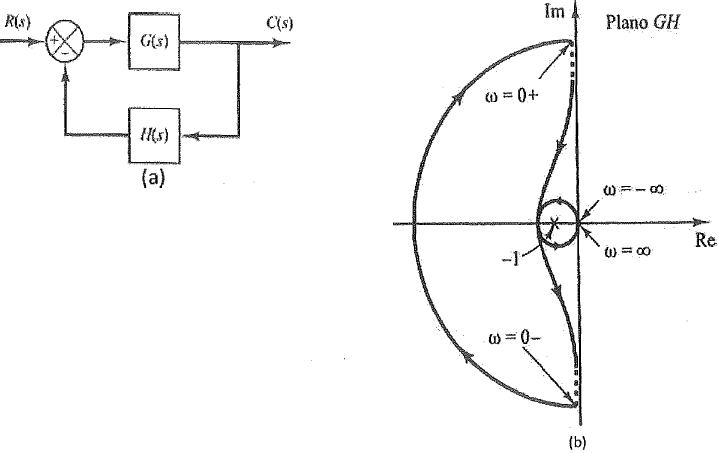
Considere que a figura (a) representa o sistema de malha fechada e que a figura (b) representa o diagrama de Nyquist desse sistema que indica que o ponto -1 +j0 é envolvido pelo lugar geométrico de G(S)H(S) uma vez. Determine o número de polos que G(S)H{S) deve ter no semiplano direito do plano S, para o sistema ser estável e assinale a opção correta.
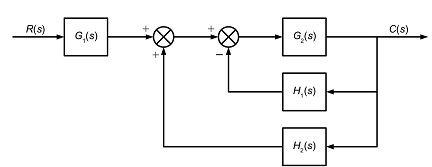
Observe a figura a seguir
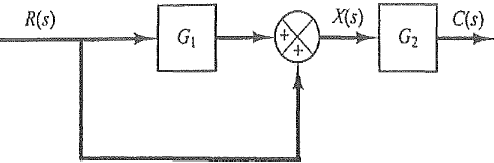
Calcule a função de transferência relacionada a C(S) e R(S), com base na figura acima, assinale a opção correta.
Analise as figuras a seguir.
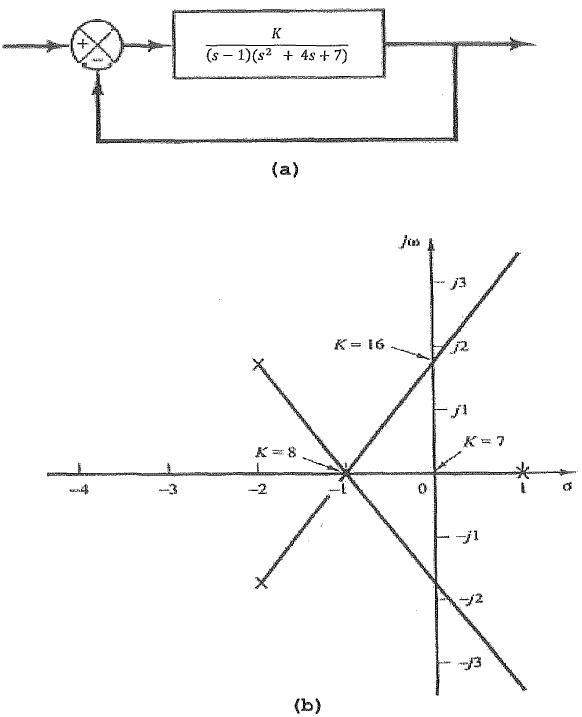
A figura (b) representa o lugar das raízes do sistema da figura (a). Determine os valores de K para os quais o sistema é estável e assinale a opção correta.
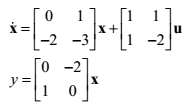
Considere o sistema representado no espaço de estados pelas seguintes equações.
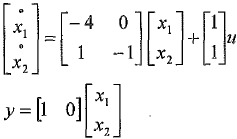
Determine a função de transferência desse sistema, e, assinale a opção correta.
Considere a seguinte representação no espaço de estados de um sistema de tempo contínuo.
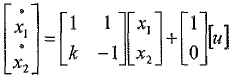
Determine o valor de K, para que o sistema NÃO seja de estado completamente controlável, e assinale a opção correta
Determine a transformada inversa de Laplace da função de transferência 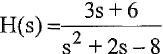 e assinale a opção correta.
e assinale a opção correta.
Dado: Considere que 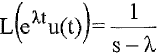
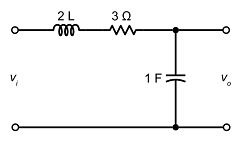
Analise a figura a seguir.
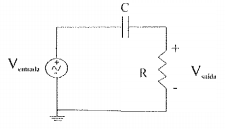
A função de transferência do circuito acima é dada por:
Em relação à terminologia utilizada nas medições, analise as afirmativas abaixo.
I. Sensibilidade é a razão entre a intensidade do sinal de saída ou resposta do instrumento e a intensidade do sinal de entrada da variável sob medição.
II. Exatidão é a medida do grau de concordância ou proximidade entre a indicação de um instrumento (valor medido) e o valor verdadeiro da variável sob medição.
III. Precisão é a medida do grau de reprodutibilidade da medida, isto é, para um determinado valor da variável, representa o grau de afastamento entre medidas sucessivas.
Está correto apenas o que se afirma em
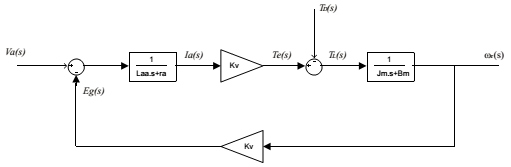
A figura abaixo mostra o diagrama de blocos de um sistema de controle. A função de transferência desse sistema é igual a
Para o circuito RLC, abaixo, as tensões de entrada e saída são, respectivamente vi e vo. E possui também, os elementos reativos descarregados no instante de tempo t = 0. Assim, a função de transferência desse circuito é igual a