Questões Militares
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 85 questões
Qual deverá ser a máxima distância “d” entre as antenas, em quilômetros?
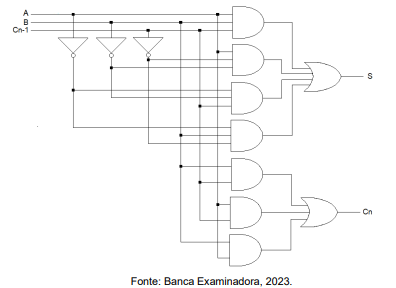
No sistema mostrado acima, se o código de entrada for A = 1, B = 0 e Cn-1 = 1, as saídas S e Cn serão
Analise a figura abaixo.
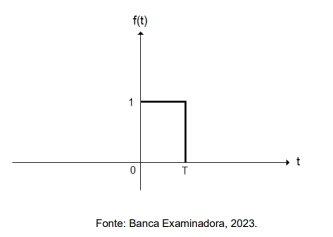
Dada a função f(t) conforme mostrado na figura acima, a transformada de Fourier de f(t) é
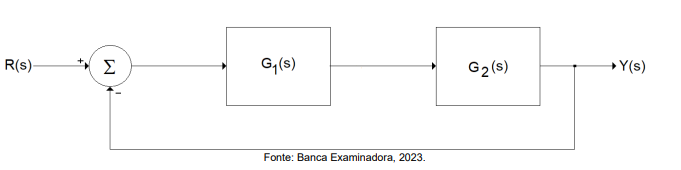
No sistema de controle realimentado mostrado na figura abaixo, 
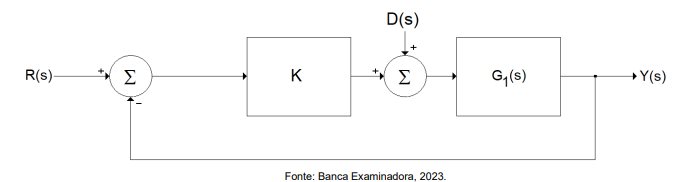
Com base na figura e informações acima, considere uma excitação em R(s) com rampa unitária e aplicada em R(s).
O valor de K para um erro máximo de 5% na saída Y(s), em estado estável, é
Considere para o sistema de controle mostrado abaixo,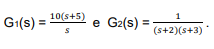
Qual é a função de transferência do sistema?
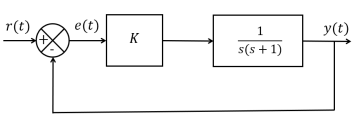
Ao se aplicar um sinal r(t) do tipo degrau com amplitude finita, é esperado que o valor do sinal de erro e(t), em regime permanente, convirja para:
G(S) = 10/s+20
é submetido à uma entrada tipo degrau unitário. O valor da resposta forçada desse sistema e o tempo necessário para atingir 98% do valor final são, respectivamente:
Considere o sistema de controle representado pelo diagrama em blocos abaixo, sendo C(s) a saída do sistema, R(s) o valor do set-point e L(s) o distúrbio.
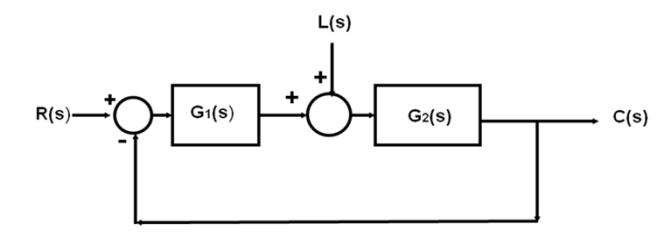
Pode-se afirmar que, para o sistema de controle regulatório, sendo R(s) = 0, a função de transferência do sistema
será dada por:
Ao aplicar-se uma função de grau r(t) com amplitude 5 à entrada de um sistema de controle por realimentação negativa, representado pela função de transferência Gp(s), obtem-se a resposta temporal: c(t) = 3∙t.
Considere:

Em relação à estabilidade do sistema de controle, é correto afirmar que:
No circuito RLC abaixo, considera-se ω = 500 rad/s e o valor eficaz da tensão em Vs igual a 60V∠0º .
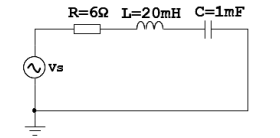
O valor da potência ativa será igual a
Esse sistema de segurança deverá acionar um alarme somente quando as quatro situações forem atendidas simultaneamente:
(1) o sensor A estiver acionado ou sensor U estiver desligado; (2) o sensor U estiver acionado ou o sensor Y estiver desligado; (3) o sensor Y estiver desligado ou o sensor U estiver desligado; (4) o sensor U ou o sensor Y estiverem acionados ou o sensor A desligado.
A única expressão lógica que atende as exigências desse sistema de segurança é
A Ladder foi uma das primeiras linguagens destinadas à programação de controladores lógicos programáveis. Associe corretamente as saídas dessa programação à sua definição.
SAÍDAS
(1) Set
(2) À rele
(3) Digital
(4) Simples
(5) Complementar
DEFINIÇÕES
( ) Comando de cargas que trabalham com tensão alternada ou contínua.
( ) Acionada de acordo com a programação feita pelo usuário e é considerada do tipo NPN ou PNP.
( ) Transferência para o endereço associado a ela do valor de tensão oposto ao de sua entrada.
( ) Acionamento e sua retenção de um operando de saída quando, na entrada associada a ela, houver um pulso.
( ) Transferência para o endereço associado a ela do valor de tensão que estiver em sua entrada.
A sequência correta é
Fontes de alimentação tipicamente possuem valor de tensão constante, sejam elas CA ou CC. Caso seja preciso variar ou controlar a potência aplicada a uma carga, é necessário o emprego de algum tipo de dispositivo capaz de controlar a quantidade de energia a ser transferida para a carga. Choppers são circuitos que podem desempenhar essa função.
Quais são as técnicas de chaveamento mais utilizadas em circuitos Choppers?
Nos projetos de controle moderno, há de se procurar algumas carcaterísticas gerais que contribuem para que o sistema cumpra sua finalidade de controle, de forma confiável e robusta frente a todas as situações que poderão afetar de alguma maneira o sistema instalado.
São características desejáveis nos sistemas de controle, exceto:
Veja a representação em blocos de um sistema de controle em malha fechada.
Qual alternativa apresenta corretamente a função transferência GMF = Y(s)/ R(s) ?
Associe as colunas relacionando a forma de atuação básica de controle com suas respetivas características.
FORMA DE ATUAÇÃO BÁSICA DE CONTROLE
(P) Proporcional (I) Integrativo (D) Derivativo
CARACTERÍSTICAS
( ) Tem a capacidade de atuar no controle enquanto houver erro. ( ) Produz correção significativa antes de o valor do erro atuante tornar-se grande. ( ) Atua na proporção da diferença entre o ponto de ajuste e a variável de processo. ( ) Leva o erro de estado estacionário para zero após tempo suficientemente longo. ( ) Produz um erro de estado estacionário de alguma intensidade. ( ) Responde em função do comportamento histórico recém passado do erro. ( ) Antecipa o erro atuante colaborando para aumentar a estabilidade do sistema.
A sequência correta dessa associação é:
Posto isso, o projetista de sistemas de controle deve procurar
A estabilidade é um dos grandes problemas em sistemas de controle linear. Um dos critérios mais simples para prever a estabilidade de um sistema é conhecido como critério de estabilidade de Routh.
Sobre o critério de estabilidade de Routh, é correto afirmar que ele
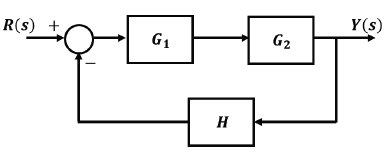
Analise os gráficos abaixo.
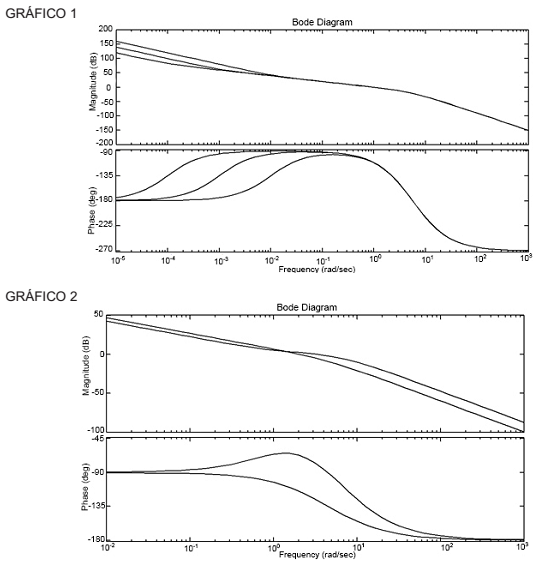
Quais ações de controle foram implementadas, respectivamente, em cada um deles?