Questões Militares
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 85 questões
s(s+2)
Um sistema de controle possui a seguinte função de transferência:
O comportamento do sistema, sua frequência natural não amortecida ωn
e seu fator de amortecimento ζ
,
respectivamente, são
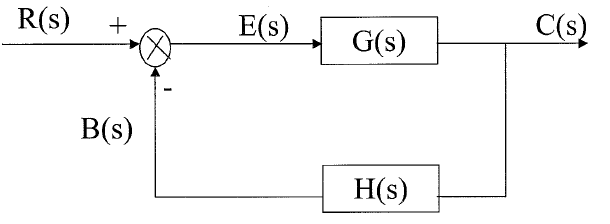
Analise a figura a seguir.
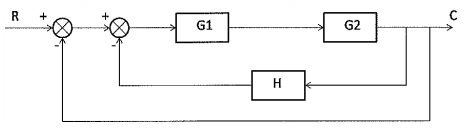
Considerando o Diagrama de Blocos do sistema da figura
acima, calcule a Função de Transferência de Malha Fechada, dada por C/R , e assinale a opção correta .
Analise as figuras a seguir.
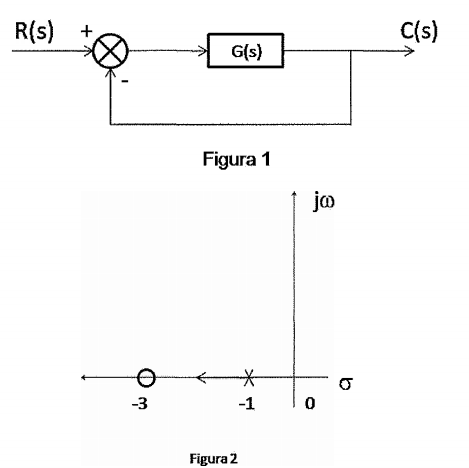
Considere o Diagrama de Blocos do sistema de controle,
representado pela Figura 1, cuja localização dos polos e
zeros de malha aberta, e dos lugares das raízes são
mostrados na Figura 2. Assinale a opção que representa o
bloco G(s).
Em relação aos conceitos que envolvem Função de Transferência, analise as seguintes afirmativas.
I - Polos e zeros são também chamados de frequências críticas .
II - Polos e zeros complexos ocorrem sempre em pares complexos conjugados.
III - A função  possui um polo, de
s
segunda ordem, no infinito.
possui um polo, de
s
segunda ordem, no infinito.
IV - A função  possui um zero, de
primeira ordem, em s = 0 e um zero, de segunda ordem em s = -3
possui um zero, de
primeira ordem, em s = 0 e um zero, de segunda ordem em s = -3
Assinale a opção correta.
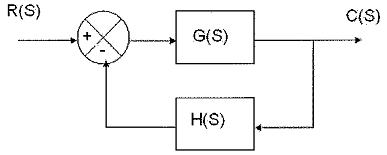
Considerando que no sistema realimentado acima a entrada é R(S) e a saída é C(S), qual será a função de transferência F(S) = C(S)/R(S)?
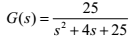
Em relação à função de transferência acima, é correto afirmar que o sistema

Assinale a opção que apresenta o resultado para o cálculo da transformada de Laplace inversa desta função para t = 0 .
Observe o diagrama em blocos a seguir.
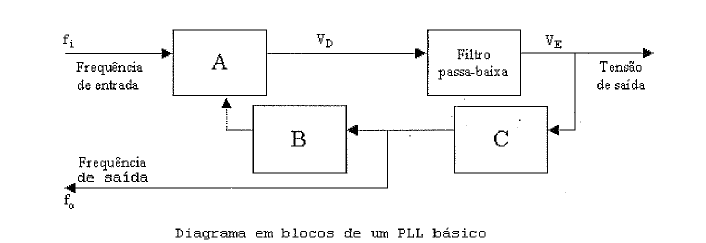
Sabendo-se que o PLL é representado basicamente pela
estrutura acima, os blocos A, B e C são, respectivamente:
Na análise e síntese de controladores e compensadores, leia as sentenças abaixo, asociando a coluna da esquerda com a direita e assinale a alternativa que apresenta a sequência correta.
I. PI – Controlador Proporcional Integral
II. PD - Controlador Proporcional Derivativo
III. PID – Controlador Proporcional Integral Derivativo
( ) O efeito desestabilizador é contrabalançado pela ação derivativa que tende a aumentar a estabilidade relativa do sistema ao mesmo tempo em que torna a resposta do sistema mais rápida devido ao seu efeito antecipatório.
( ) A ação integral é em geral utilizada em conjunto com a ação proporcional constituindo-se este controlador.
( ) Nesse caso, o sinal de controle a ser aplicado é proporcional a
uma predição da saída do processo.

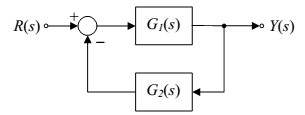
Considere o sistema linear invariante no tempo colocado na figura a seguir, onde as variáveis mostradas foram obtidas por transformada de Laplace. A função de transferência Y(s)/R(s) é
DADOS:
Valores de tangente:
tan(0°) = 0, tan(30°) = (√3)/3, tan(45°) = 1, tan(60°) = √3, tan(90°) = ∞, tan(180°-α) = -tan(α), tan(-α) = -tan(α).
Valores de seno:
sen(0°) = 0, sen(30°) = 1/2, sen(45°) = (√2)/2, sen(60°) = (√3)/2, sen(90°) = 1, sen(90°-α) = cos(α), sen(180°-α) = sen(α), sen(-α) = -sen(α).
Valores de cosseno:
cos(0°) = 1, cos(30°) = (√3)/2, cos(45°) = (√2)/2, cos(60°) = 1/2, cos(90°) = 0, cos(90°-α ) = sen(α), cos(180°-α) = -cos(α), cos(-α) = cos(α).
Transformada de Laplace:
L{f(t)} = F(s), L{exp(-at)} = 1/(s+a), L{1 - exp(-at)} = a/(s(s+a)), L{cos(at)} = s/(s2 +a2 ), L{sen(at)} = a/(s2 +a2).
Resistividade aproximada dos condutores de cobre:
seção transversal de 1,5 mm2 = 10 Ω/km, seção transversal de 2,5 mm2 = 7 Ω/km,
seção transversal de 4 mm2 = 4 Ω/km, seção transversal de 6 mm2 = 3 Ω/km.
Representação de número complexo em forma polar: a∠b onde a é o módulo e b o argumento.
Representação do complemento do valor A: Ā
Observe a figura a seguir.
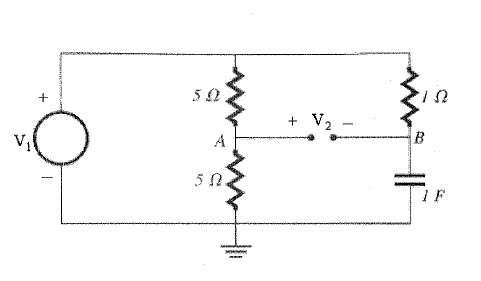
Sendo, H(s)=V2(s)/V1(s), qual é a função de transferência do circuito acima?
Observe o sistema a seguir.
Qual será a função de transferência de malha fechada C(s) /R(s) na figura acima?