Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 127 questões
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262941
Engenharia de Automação
A maioria das empresas procura, atualmente, otimizar a conectividade de suas redes através da automação baseada em soluções da tecnologia da informação. Já é comum a interligação de controladores e de outros dispositivos com tendência aos barramentos de campo, que serão gradualmente integrados a outros sistemas de automação.
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262940
Engenharia de Automação
Atualmente, muitos sistemas têm sido desenvolvidos na parte física do processo de automação industrial, destacando-se a transmissão de informação para controle das operações. As redes fazem a comunicação entre diferentes setores com o objetivo de trocar informações.
As chamadas redes de chão de fábrica
As chamadas redes de chão de fábrica
Q262804
Engenharia de Automação
Para simplificar o problema de transmissão de dados, as redes de computadores são estruturadas em camadas, as quais se encarregam de funções específicas.
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192338
Engenharia de Automação
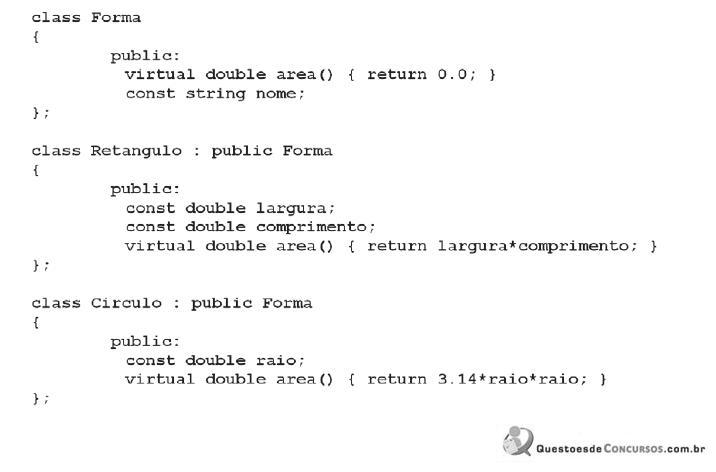
Considere as afirmações abaixo sobre o código em C++ apresentado acima.
I - As classes Retangulo e Circulo herdam a classe Forma.
II - O método “area” das classes Retangulo e Circulo sobrescreve o método de mesmo nome da classe ancestral (Forma) caso o objeto não seja instanciado diretamente da classe Forma.
III - O atributo “nome” é exclusivo da classe Forma e não existe nos objetos instanciados diretamente das classes Retangulo e Circulo.
IV - O atributo “raio” é exclusivo da classe Circulo e não existe nos objetos instanciados diretamente das classes Forma e Retangulo.
Estão corretas as afirmações
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192337
Engenharia de Automação
O protocolo de comunicação de dados TCP é um protocolo
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192335
Engenharia de Automação
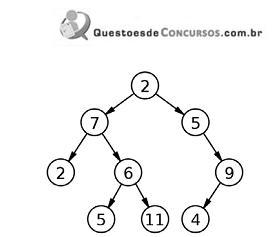
A estrutura de dados representada pelo diagrama da figura acima é denominada
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192333
Engenharia de Automação
As redes de computadores utilizam um equipamento para encaminhar pacotes de dados recebidos na rede para um determinado destino pelo caminho mais apropriado.
Esse dispositivo é conhecido como
Esse dispositivo é conhecido como
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192330
Engenharia de Automação

O trecho de um código implementado em Linguagem Ladder, mostrado no diagrama da figura acima, pode ser reescrito em outra linguagem para Controladores Lógicos Programáveis (CLP), conhecida por Texto Estruturado, com a expressão
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192327
Engenharia de Automação
Pretende-se incluir, em um programa implementado utilizando-se a Linguagem Ladder, um trecho de código responsável por disparar um alarme (AL). O alarme ocorrerá caso haja uma tentativa de se fechar a chave contactora da bancada 1 (B1) sem que o disjuntor da fonte de alimentação (DF) esteja ligado, e a tensão na mesma (VAL) seja maior que zero. O trecho de código que deverá ser incluído no programa para o seu correto funcionamento é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192325
Engenharia de Automação
No projeto de um painel supervisório do qual faz parte um mostrador com dois displays de sete segmentos operados por varredura, o projetista investiga por que o mostrador exibe o valor 19 em uma situação na qual deveria exibir 15.
Navegando pelo código em C para o microcontrolador que comanda o painel, ele encontra o trecho responsável pela exibição. Nesse trecho, que utiliza funções nomeadas de forma autoexplicativa, ele encontra
Navegando pelo código em C para o microcontrolador que comanda o painel, ele encontra o trecho responsável pela exibição. Nesse trecho, que utiliza funções nomeadas de forma autoexplicativa, ele encontra
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192323
Engenharia de Automação
Numa indústria química, utilizam-se tecnologias de transmissão de dados para operações de controle de processos em ambientes com riscos de explosão.
Uma tecnologia que foi projetada para operar nesse tipo de ambiente é a
Uma tecnologia que foi projetada para operar nesse tipo de ambiente é a
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192322
Engenharia de Automação
Sobre as tecnologias usadas para a transferência de dados, as duas que melhor se equiparam em termos de taxa máxima de transferência são
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192321
Engenharia de Automação
Encontram-se disponíveis no mercado modelos de analisadores lógicos idênticos, que diferem entre si somente no número de canais disponíveis. Pretende-se analisar, completamente e ao mesmo tempo, uma comunicação SPI entre dois equipamentos e uma comunicação I2C entre outros dois.
Dentre os analisadores lógicos disponíveis, o mais simples e capaz de realizar essa tarefa é o que possui
Dentre os analisadores lógicos disponíveis, o mais simples e capaz de realizar essa tarefa é o que possui
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192296
Engenharia de Automação
A conectividade entre os componentes de automação é um fator importante no projeto de uma rede de comunicação, uma vez que se precisa garantir que os componentes da rede consigam comunicar-se corretamente entre si. Na especificação de um transdutor, por exemplo, o padrão de transmissão de saída do sinal analógico é um item a ser determinado.
Nesse sentido, NÃO corresponde a um padrão de transmissão de saída de sinal analógico
Nesse sentido, NÃO corresponde a um padrão de transmissão de saída de sinal analógico
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192295
Engenharia de Automação
PROFIBUS é um dos protocolos mais utilizados nas plantas industriais para comunicação em redes com aplicação em processos, manufatura e automação predial. É um sistema aberto que independe de fornecedor.
A esse respeito, analise as afirmativas abaixo.
I - A versão Profibus-DP é apropriada para conexões de periferia descentralizada.
II - A versão Profibus-PA é intrinsecamente segura.
III - A versão Profibus-FMS é apropriada para comunicação em células.
Estão corretas as afirmativas
A esse respeito, analise as afirmativas abaixo.
I - A versão Profibus-DP é apropriada para conexões de periferia descentralizada.
II - A versão Profibus-PA é intrinsecamente segura.
III - A versão Profibus-FMS é apropriada para comunicação em células.
Estão corretas as afirmativas
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192294
Engenharia de Automação
A automação industrial exige sistemas eficazes e seguros para a comunicação de dados de processo. Essas redes precisam ser confiáveis e ter conectividade. Dentre as opções de comunicação de dados em nível de chão de fábrica, o sistema de comunicação AS Interface atende a todos esses requisitos e tem grande aplicação.
Enquadra-se na rede AS Interface o sistema de
Enquadra-se na rede AS Interface o sistema de
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Segurança do Trabalho |
Q183318
Engenharia de Automação
Durante a vida útil de equipamentos mecânicos e elétricos ocorrem falhas. Para demonstrar essas falhas, elas são plotadas em um gráfico que recebe o nome de curva da banheira, por ser similar a uma banheira. Quais são essas falhas?
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267625
Engenharia de Automação
O controlador lógico programável (CLP) é utilizado nas plantas industriais para automatizar processos, por meio de um adequado sequenciamento das etapas associadas. O dispositivo é composto, basicamente, por unidades de entrada (digitais e analógicas), unidade de processamento e unidades de saída (digitais e analógicas), além de, possivelmente, outras unidades específicas. Um circuito que pode fazer parte do CLP é o WDT (watch dog timer), cuja função é monitorar
Q1229380
Engenharia de Automação
Os sistemas instrumentados de segurança são fundamentais para a garantia operacional da unidade, da vida humana e dos equipamentos envolvidos. A esse respeito, analise as afirmativas a seguir.
I - Sistemas automáticos com votação 1 de 2 são configurados para que, no caso de um dos dois instrumentos estar funcionado a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
II - Sistemas automáticos com votação 2 de 2 são configurados para que, no caso um dos dois instrumentos estar funcionando a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
III - Uma utilização para o conceito de falha segura é quando o canal de entrada de um Controlador Lógico Programável (CLP) opera normalmente energizado, sendo que, em caso de falha do equipamento de campo ou caso haja o rompimento dos fios, o alarme e o intertravamento da lógica de controle atuam.
IV - Uma válvula normalmente aberta, instalada na saída de um tanque com gás pressurizado, está configurada para operar fechada, abrindo somente quando for solicitado, sendo que, em caso de shutdown, a alimentação elétrica desta válvula será desligada e, por questões de segurança, permanecerá fechada.
São corretas APENAS as afirmativas
I - Sistemas automáticos com votação 1 de 2 são configurados para que, no caso de um dos dois instrumentos estar funcionado a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
II - Sistemas automáticos com votação 2 de 2 são configurados para que, no caso um dos dois instrumentos estar funcionando a contento, este controle a malha em questão, enquanto o outro pode ser reparado.
III - Uma utilização para o conceito de falha segura é quando o canal de entrada de um Controlador Lógico Programável (CLP) opera normalmente energizado, sendo que, em caso de falha do equipamento de campo ou caso haja o rompimento dos fios, o alarme e o intertravamento da lógica de controle atuam.
IV - Uma válvula normalmente aberta, instalada na saída de um tanque com gás pressurizado, está configurada para operar fechada, abrindo somente quando for solicitado, sendo que, em caso de shutdown, a alimentação elétrica desta válvula será desligada e, por questões de segurança, permanecerá fechada.
São corretas APENAS as afirmativas
Q1187990
Engenharia de Automação
Tratando-se de redes industriais, o protocolo Profibus (Process Field Bus) apresenta algumas características, dentre as citadas a seguir.
I - Utiliza três camadas do modelo OSI: física, enlace de dados e aplicação.
II - É um protocolo que só permite um mestre na rede.
III - A passagem do bastão (Token Passing) é somente realizada quando um dispositivo escravo deseja realizar uma pergunta ou comando.
IV - O Profibus DP é utilizado em nível de célula, enquanto o Profibus FMS é utilizado em nível de dispositivo.
V - O Profibus PA (Process Automation) permite a utilização de barramento comum em áreas de segurança intrínseca, diminuindo os custos com equipamentos e instalação.
É(São) correta(s) APENAS a(s) característica(s)
I - Utiliza três camadas do modelo OSI: física, enlace de dados e aplicação.
II - É um protocolo que só permite um mestre na rede.
III - A passagem do bastão (Token Passing) é somente realizada quando um dispositivo escravo deseja realizar uma pergunta ou comando.
IV - O Profibus DP é utilizado em nível de célula, enquanto o Profibus FMS é utilizado em nível de dispositivo.
V - O Profibus PA (Process Automation) permite a utilização de barramento comum em áreas de segurança intrínseca, diminuindo os custos com equipamentos e instalação.
É(São) correta(s) APENAS a(s) característica(s)