Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 122 questões
Ano: 2023
Banca:
IF-SP
Órgão:
IF-SP
Prova:
IF-SP - 2023 - IF-SP - Técnico de Laboratório/Área: Mecatrônica |
Q2287653
Engenharia de Automação
Em um sistema de logística, um robô é utilizado para direcionar pacotes para diferentes destinos com base em um código de barras presente em
cada pacote. O robô funciona com uma máquina
de estados com quatro estados: S0, S1, S2 e S3,
que representam diferentes destinos. A lógica da
máquina de estados é:
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
• No estado S0: com entrada 1, vai para S1; com entrada 0, permanece em S0.
• No estado S1: com entrada 1, vai para S2; com entrada 0, volta para S0.
• No estado S2: com entrada 1, retorna para S1; com entrada 0, vai para S3.
• No estado S3: independente da entrada, retorna para S0.
Se o robô começa no estado S0 e recebe as entradas: 1, 1, 0, qual será o estado final?
Ano: 2023
Banca:
CESPE / CEBRASPE
Órgão:
DATAPREV
Prova:
CESPE / CEBRASPE - 2023 - DATAPREV - Analista de Tecnologia da Informação - Perfil: Sustentação Tecnológica |
Q2275537
Engenharia de Automação
Julgue o item subsequente, relativo aos conceitos de conformidade e automação de TI: Puppet, Ansible.
O Ansible é uma solução de software que permite controlar
um dispositivo, através de agentes nele instalados, a partir de
um local diferente, sendo que a comunicação entre o servidor
e o dispositivo ocorre por meio dos referidos agentes.
Ano: 2023
Banca:
FEPESE
Órgão:
Companhia Águas de Joinville
Prova:
FEPESE - 2023 - Companhia Águas de Joinville - Analista de Gestão - Automação |
Q2265170
Engenharia de Automação
Assinale a alternativa correta em relação às redes
industriais e suas características.
Q2182396
Engenharia de Automação
Qual é a função de um atuador em um robô?
Q2182395
Engenharia de Automação
Qual é a principal diferença entre um sistema SCADA e um sistema PIMS em um ambiente industrial?
Q2182391
Engenharia de Automação
Em relação às redes industriais PROFIBUS DP e PROFINET, pode-se afirmar que:
Q2182390
Engenharia de Automação
Automação de sistemas industriais pode ser obtida com a utilização de dispositivos para acionamentos
eletromecânicos.
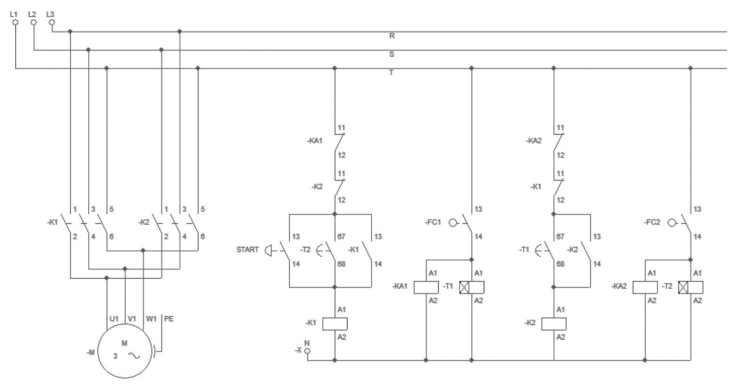
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Interpretando os diagramas de comando e força acima, pode-se entender que o sistema foi concebido para:
Ano: 2023
Banca:
UFPR
Órgão:
IF-PR
Prova:
UFPR - 2023 - IF-PR - Analista em Tecnologia da Informação |
Q2182227
Engenharia de Automação
Quem vai comprar uma placa Arduino geralmente se sente um pouco perdido devido ao grande número de tipos de
Arduino e funções disponíveis. Nesse sentido, é importante saber que NÃO corresponde a essa categoria de
plataforma a placa Arduino:
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171376
Engenharia de Automação
Considere um robô móvel não-holonômico que se move sobre um plano horizontal sem obstáculos. É correto
dizer que o robô:
Ano: 2022
Banca:
FEPESE
Órgão:
Prefeitura de Balneário Camboriú - SC
Prova:
FEPESE - 2022 - Prefeitura de Balneário Camboriú - SC - Professor de Inovação e Tecnologia - Edital nº 005 |
Q2401086
Engenharia de Automação
Qual o paradigma predominante no que diz respeito à prática de ensino utilizando a robótica?
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894295
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
A cinemática inversa procura analisar os incrementos de posição ao longo do tempo de cada um dos componentes do braço de um robô.
A cinemática inversa procura analisar os incrementos de posição ao longo do tempo de cada um dos componentes do braço de um robô.
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894294
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
A transformação que descreve a relação entre a mão de um manipulador robótico e o referencial de origem também descreve as relações entre os elos intermediários do braço de um robô.
A transformação que descreve a relação entre a mão de um manipulador robótico e o referencial de origem também descreve as relações entre os elos intermediários do braço de um robô.
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894293
Engenharia de Automação
Julgue o item que se segue, a respeito de robótica.
Os atuadores elétricos utilizados para movimentar as juntas de um robô possuem o inconveniente de gerar arcos elétricos.
Os atuadores elétricos utilizados para movimentar as juntas de um robô possuem o inconveniente de gerar arcos elétricos.
Ano: 2019
Banca:
ADM&TEC
Órgão:
Prefeitura de Rio Largo - AL
Prova:
ADM&TEC - 2019 - Prefeitura de Rio Largo - AL - Eletricista |
Q1712202
Engenharia de Automação
Leia as afirmativas a seguir:
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
I. A empatia é a atitude do entendimento, da interação e da expressão facial e corporal.
II. Um sistema de automação predial não permite controlar e monitorar o consumo energético da edificação.
III. O desempenho do produto é um fator que não deve ser considerado no momento da escolha dos materiais elétricos.
Marque a alternativa CORRETA:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103244
Engenharia de Automação
Em ambientes industriais, a integração e comunicação
entre diversos dispositivos eletrônicos de fabricantes
distintos é um processo comum e necessário; para
garantir a segurança e confiabilidade na transmissão das
informações são utilizadas redes de automação.
Considerando a rede que utiliza o protocolo Fieldbus,
assinale a alternativa CORRETA.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103242
Engenharia de Automação
Desde seu surgimento, a linguagem de programação
Ladder se configurou com uma das linguagens de
programação para controladores lógicos programáveis
mais utilizadas na indústria.
Em relação a essa linguagem, assinale a alternativa
CORRETA.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103241
Engenharia de Automação
A criação de diversos modelos de equipamentos
dedicados à automação industrial gerou uma grande
variedade de equipamentos e, como consequência,
surgiram diversas linguagens para programação de
controladores lógicos programáveis, – CLPs.
São linguagens gráficas específicas para CLPs,
EXCETO:
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103240
Engenharia de Automação
A Norma IEC 61131 define um padrão global para
programação de controle industrial.
Assinale a alternativa que apresenta linguagens definidas
por essa norma.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103233
Engenharia de Automação
O sistema de numeração hexadecimal utiliza a base 16,
logo possui 16 símbolos possíveis.
Assinale a alternativa que apresenta o resultado
da conversão hexadecimal-decimal para o número
hexadecimal 8AF2.
Ano: 2018
Banca:
FUNDEP (Gestão de Concursos)
Órgão:
INB
Prova:
FUNDEP (Gestão de Concursos) - 2018 - INB - Engenheiro de Automação e Controle |
Q1103231
Engenharia de Automação
O sistema decimal binário é o sistema de codificação
numérica mais importante em sistemas digitais.
Assinale a alternativa que apresenta o resultado da
conversão decimal-binário para o número decimal 25.