Questões de Concurso
Sobre robótica e automação em engenharia de automação
Foram encontradas 118 questões
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541194
Engenharia de Automação
Texto associado
Em relação às afirmativas abaixo, marque a alternativa correta:
I. Um robô com mais de seis graus de liberdade é intrinsecamente redundante, no que tange ao posicionamento com destreza do efetuador final no espaço 3D.
II. Robôs de cadeia fechada e paralelos são inerentemente redundantes.
III. Os manipuladores cinematicamente redundantes permitem infinitas soluções dasua cinemática inversa para uma postura particular do efetuador final.
IV. A redundância é um conceito relativo à tarefa definida para o manipulador final, ou seja, o mesmo manipulador pode ser redundante para determinada tarefa e não redundante para outra.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541193
Engenharia de Automação
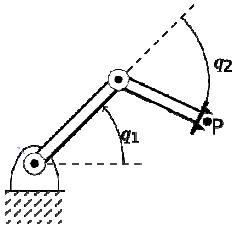
Seja o manipulador planar da figura abaixo, com duas juntas rotacionais, cujas posições são definidas pelas variáveis q1 e q2. O efetuador final está montado no elo 2, e sua posição é definida pelo ponto P. Em relação à cinemática desse manipulador, é INCORRETO afirmar:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541192
Engenharia de Automação
Em relação às afirmativas abaixo sobre a definição de graus de liberdade de um manipulador.
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
I. Número de variáveis independentes necessárias para especificar completamente a configuração de uma cadeia cinemática em relação a uma referência.
II. Dimensão do espaço de configuração de um manipulador.
III. Número de juntas de um manipulador, serial ou paralelo.
Assinale a alternativa em que toda(s) a(s) afirmativa(s) está(ão) CORRETA(S):
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541191
Engenharia de Automação
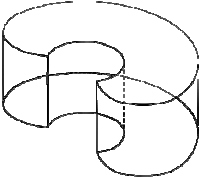
O robô manipulador que apresenta o volume de trabalho característico mostrado na figura abaixo pode ser cinematicamente classificado como:
Ano: 2015
Banca:
IF-RS
Órgão:
IF-RS
Prova:
IF-RS - 2015 - IF-RS - Professor - Automação e Controle |
Q541190
Engenharia de Automação
Os ângulos Roll-Pitch-Yaw (RPY) são usados como representação mínima de orientação. Em certas posturas de um corpo rígido, porém, podem ocorrer singularidades de representação, ou seja, não é possível obter um único conjunto de ângulos RPY a partir da matriz de rotação. A única alternativa de representação de orientação que NÃO apresenta esse problema é:
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador Tecnologista - Metrologia em Informática |
Q267625
Engenharia de Automação
O controlador lógico programável (CLP) é utilizado nas plantas industriais para automatizar processos, por meio de um adequado sequenciamento das etapas associadas. O dispositivo é composto, basicamente, por unidades de entrada (digitais e analógicas), unidade de processamento e unidades de saída (digitais e analógicas), além de, possivelmente, outras unidades específicas. Um circuito que pode fazer parte do CLP é o WDT (watch dog timer), cuja função é monitorar
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262980
Engenharia de Automação
O engenheiro responsável por sistemas de automação deve atender às especificações das tarefas a serem realizadas. Alguns desses fatores devem ser interpretados através de modelos matemáticos.
Um fator que NÃO está associado a interpretações através de modelos matemáticos é o(a)
Um fator que NÃO está associado a interpretações através de modelos matemáticos é o(a)
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262978
Engenharia de Automação
Os sistemas de controle envolvem componentes de diferentes tipos. Na engenharia de controle é comum representar esses componentes por modelos matemáticos. A respeito desses modelos, observe as afirmativas a seguir.
I - As relações entre entrada-saída de muitos componentes não lineares deverão ser linearizadas em torno dos pontos de operação, para limitar a faixa de variáveis.
II - O modelo matemático deve representar os aspectos essenciais de um componente físico.
III - As previsões do comportamento do sistema, baseadas no modelo matemático, devem ser razoavelmente precisas.
Está correto o que se afirma em
I - As relações entre entrada-saída de muitos componentes não lineares deverão ser linearizadas em torno dos pontos de operação, para limitar a faixa de variáveis.
II - O modelo matemático deve representar os aspectos essenciais de um componente físico.
III - As previsões do comportamento do sistema, baseadas no modelo matemático, devem ser razoavelmente precisas.
Está correto o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262975
Engenharia de Automação
Com o objetivo de exercer o controle e a supervisão de plantas industriais, é frequente a utilização do sistema SCADA (supervisory control and data acquisition). O seu uso permite acesso a informações sobre o estado atual do sistema através de recursos que podem ser visíveis na tela dos computadores.
Outra característica importante no software, utilizada no sistema, é a
Outra característica importante no software, utilizada no sistema, é a
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262952
Engenharia de Automação
Um projeto de automação utiliza um sistema hidráulico que opera com resfriamento de água. A água circula através de uma bomba que a retira de um poço, à razão de 7,5 litros por segundo. O engenheiro identificou que o poço possui 10 metros de profundidade e que o rendimento da bomba é de 80%.
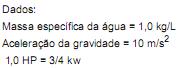
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
A potência mecânica, em HP, necessária e suficiente ao sistema hidráulico, atendendo às condições dadas, é
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262951
Engenharia de Automação
Considere as afirmativas abaixo que se referem às dificuldades que o uso de ondas de rádio em alta frequência, como alternativa aos cabos coaxiais ou fibras óticas, apresentam no processo de transmissão de dados entre redes de computadores conectados aos sistemas de automação.
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
I – O uso de ondas de rádio em alta frequência depende de regulamentação junto aos órgãos públicos.
II – O uso de ondas de rádio em alta frequência gera problemas de autenticação junto aos usuários.
III – O uso de ondas de rádio em alta frequência está sujeito à ocorrência de interferência entre os componentes do sistema.
IV – O uso de ondas de rádio em alta frequência impossibilita a existência de unidades transceptoras móveis.
Está correto APENAS o que se afirma em
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262941
Engenharia de Automação
A maioria das empresas procura, atualmente, otimizar a conectividade de suas redes através da automação baseada em soluções da tecnologia da informação. Já é comum a interligação de controladores e de outros dispositivos com tendência aos barramentos de campo, que serão gradualmente integrados a outros sistemas de automação.
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Tendo em vista a necessidade crescente de segurança no sistema de automação, os usuários podem assumir alguns cuidados, como
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2012 - Transpetro - Engenheiro Júnior - Automação |
Q262940
Engenharia de Automação
Atualmente, muitos sistemas têm sido desenvolvidos na parte física do processo de automação industrial, destacando-se a transmissão de informação para controle das operações. As redes fazem a comunicação entre diferentes setores com o objetivo de trocar informações.
As chamadas redes de chão de fábrica
As chamadas redes de chão de fábrica
Q262804
Engenharia de Automação
Para simplificar o problema de transmissão de dados, as redes de computadores são estruturadas em camadas, as quais se encarregam de funções específicas.
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
No modelo de referência OSI, a camada que realiza controle de acesso ao meio é
Ano: 2006
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2006 - Petrobras - Analista de Comércio e Suprimento Pleno – Gás e Energia |
Q194524
Engenharia de Automação
São características das chamadas “indústrias de rede”:
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192338
Engenharia de Automação
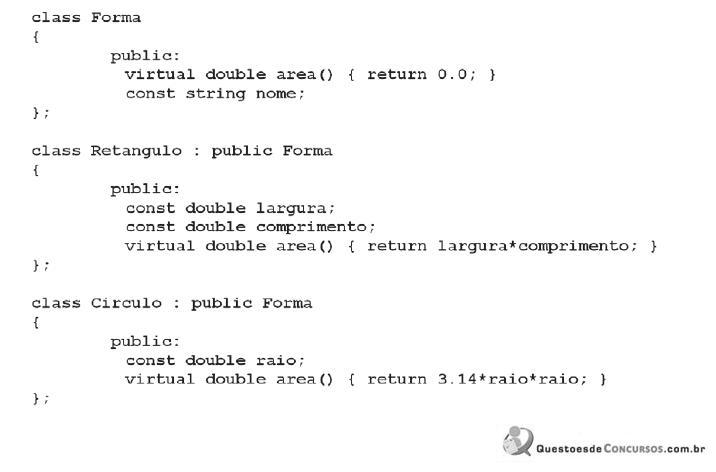
Considere as afirmações abaixo sobre o código em C++ apresentado acima.
I - As classes Retangulo e Circulo herdam a classe Forma.
II - O método “area” das classes Retangulo e Circulo sobrescreve o método de mesmo nome da classe ancestral (Forma) caso o objeto não seja instanciado diretamente da classe Forma.
III - O atributo “nome” é exclusivo da classe Forma e não existe nos objetos instanciados diretamente das classes Retangulo e Circulo.
IV - O atributo “raio” é exclusivo da classe Circulo e não existe nos objetos instanciados diretamente das classes Forma e Retangulo.
Estão corretas as afirmações
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192337
Engenharia de Automação
O protocolo de comunicação de dados TCP é um protocolo
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192335
Engenharia de Automação
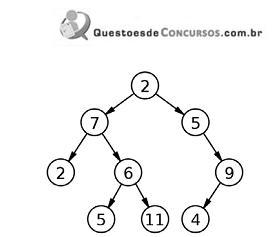
A estrutura de dados representada pelo diagrama da figura acima é denominada
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192333
Engenharia de Automação
As redes de computadores utilizam um equipamento para encaminhar pacotes de dados recebidos na rede para um determinado destino pelo caminho mais apropriado.
Esse dispositivo é conhecido como
Esse dispositivo é conhecido como
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Automação |
Q192330
Engenharia de Automação

O trecho de um código implementado em Linguagem Ladder, mostrado no diagrama da figura acima, pode ser reescrito em outra linguagem para Controladores Lógicos Programáveis (CLP), conhecida por Texto Estruturado, com a expressão