Questões de Concurso
Sobre modelagem, controle e instrumentação de processos químicos em engenharia química e química industrial
Foram encontradas 145 questões
Q477314
Engenharia Química e Química Industrial
De acordo com a terminologia para instrumentos de controle,
enumere a segunda coluna de acordo com a primeira.
1ª coluna 2ª coluna
1. Ação direta ( ) Relação entre os valores máximo e mínimo em que a
resposta de um dispositivo qualquer acompanha a
sua curva ideal, obedecendo a um desvio máximo
pré-definido.
2. Ação reversa ( ) Afastamento entre o valor real e o valor desejado
da variável controlada, na condição de estado de equilíbrio.
3. Ganho ( ) Resposta varia em proporção direta com o sinal de entrada.
4. Alcance de faixa
(rangeability) ( ) Relação numérica entre o incremento do sinal de saída
de um dispositivo qualquer e a variação correspondente
do sinal de entrada.
5. Erro de Controle
(off-set) ( ) Resposta varia em proporção inversa ao sinal de entrada.
Qual a sequência correta, de cima para baixo?
1ª coluna 2ª coluna
1. Ação direta ( ) Relação entre os valores máximo e mínimo em que a
resposta de um dispositivo qualquer acompanha a
sua curva ideal, obedecendo a um desvio máximo
pré-definido.
2. Ação reversa ( ) Afastamento entre o valor real e o valor desejado
da variável controlada, na condição de estado de equilíbrio.
3. Ganho ( ) Resposta varia em proporção direta com o sinal de entrada.
4. Alcance de faixa
(rangeability) ( ) Relação numérica entre o incremento do sinal de saída
de um dispositivo qualquer e a variação correspondente
do sinal de entrada.
5. Erro de Controle
(off-set) ( ) Resposta varia em proporção inversa ao sinal de entrada.
Qual a sequência correta, de cima para baixo?
Q477313
Engenharia Química e Química Industrial
Entre as fontes de incerteza que contribuem para a incerteza de medição de vazão por placa de orifício não está incluída a opção:
Q477305
Engenharia Química e Química Industrial
Numa malha de controle, um elemento primário de temperatura acoplado a um transmissor foi especificado para operar com sinal de saída, de corrente elétrica, entre 4mA e 20mA. Sabendo-se que o instrumento foi projetado e ajustado para operar, com sinal de entrada, numa faixa de temperatura entre -50°C e 150°C, escolha a opção abaixo que mostra o valor do ganho desse instrumento.
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Processamento Júnior-2012 |
Q432126
Engenharia Química e Química Industrial
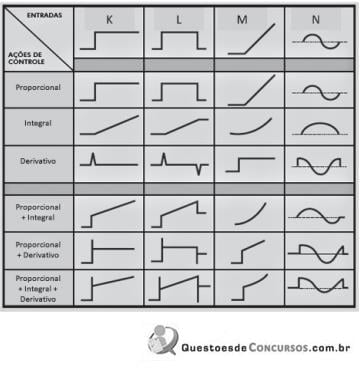
O quadro acima mostra como são os modos de correção dos diversos tipos de controle. Em cada coluna, observa-se como a ação de cada tipo de controle pode atuar.
Os modos K, L, M e N, são, respectivamente,
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Processamento Júnior-2012 |
Q432125
Engenharia Química e Química Industrial
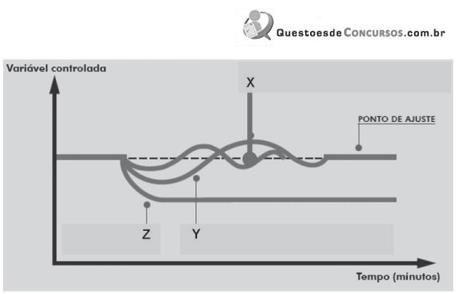
O gráfico acima mostra comparativamente alguns modos de controle aplicados em ajustes de controladores de processo.
Os modos de controle descritos em X, Y e Z são, respectivamente,
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Processamento Júnior-2012 |
Q432124
Engenharia Química e Química Industrial
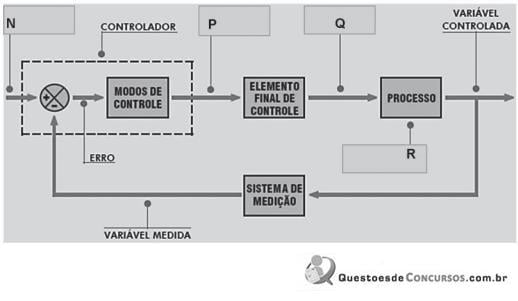
O diagrama de bloco, descrito na figura, mostra uma malha de controle fechada de um determinado processo. São vistos agentes descritos como R, Q, P e N, que são fornecidos ou recebidos pelo controle e pelo processo.
Os agentes R, Q, P e N são, respectivamente,
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Processamento Júnior-2012 |
Q432123
Engenharia Química e Química Industrial

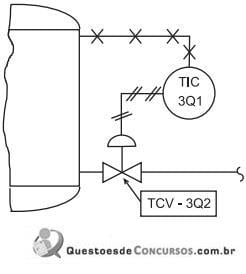
Na figura acima, vê-se um diagrama de controle mostrando a ação do controlador. No esquema mostrado, P, Q e o tipo de ação sobre a variável controlada são, respectivamente,
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Processamento Júnior-2012 |
Q432121
Engenharia Química e Química Industrial
No controle de processo, fazem-se necessários ajustes de modo a garantir a confiabilidade de valores e respostas. Vários conceitos são importantes, como sensibilidade, tempo morto e ganho.
O ganho do sistema de controle
O ganho do sistema de controle
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Operação Júnior-2012 |
Q430573
Engenharia Química e Química Industrial
Nos processos industriais, para melhorar a eficiência e o controle, faz-se uso de instrumentação industrial. Na figura acima, há uma malha de controle de um tanque industrial.
Analisando a figura, verifica-se que a(o)
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Operação Júnior-2012 |
Q430570
Engenharia Química e Química Industrial
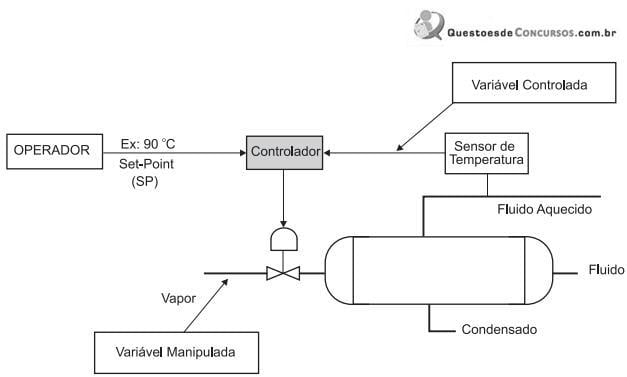
No processo de aquecimento de um fluido com uso de vapor e trocador de calor, utiliza-se um controle de processo a fim de garantir a eficiência dessa operação.
Analisando o esquema acima, verifica-se que o controle é uma malha
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Perfuração e Poços Júnior-2012 |
Q429144
Engenharia Química e Química Industrial
Para que os processos possam funcionar com certo grau de confiabilidade, é necessário o uso de ferramentas de controle. Tais ferramentas podem controlar os processos por inteiro ou apenas parte deles. Os controles, normalmente, são feitos através de dois tipos de malhas de controle: a malha aberta e a malha fechada.
Uma diferença básica desses dois tipos de malhas é que a malha
Uma diferença básica desses dois tipos de malhas é que a malha
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico Químico de Petróleo Júnior |
Q234274
Engenharia Química e Química Industrial
Antes de se analisar a resposta de um processo qualquer, é necessário validar os resultados experimentais. Para tanto, são realizados cálculos como média aritmética, desvio padrão e determinação de erros de arredondamento de números.
A esse respeito, considere as afirmativas abaixo.
I - A média da amostra é uma medida de tendência central, representando o valor médio de todas as observações de um conjunto de dados.
II - O desvio padrão de uma amostra é a raiz quadrada da variância, podendo, então, ser um valor positivo ou negativo.
III - O erro de truncamento de um número significa a mesma coisa que erro de arredondamento desse número.
IV - Obter uma curva de calibração linear significa determinar a equação da reta que melhor se ajusta aos pontos experimentais.
Está correto APENAS o que se afirma em
A esse respeito, considere as afirmativas abaixo.
I - A média da amostra é uma medida de tendência central, representando o valor médio de todas as observações de um conjunto de dados.
II - O desvio padrão de uma amostra é a raiz quadrada da variância, podendo, então, ser um valor positivo ou negativo.
III - O erro de truncamento de um número significa a mesma coisa que erro de arredondamento desse número.
IV - Obter uma curva de calibração linear significa determinar a equação da reta que melhor se ajusta aos pontos experimentais.
Está correto APENAS o que se afirma em
Q1208422
Engenharia Química e Química Industrial
Quando, num processo industrial, os valores de medição sofrem atrasos, é necessário que a unidade de controle efetue correções, a fim de que do valor medido possam ser eliminadas essas variações. Além disso, o ajuste deve ser feito com grande velocidade. Um outro problema é a velocidade de recebimento dos valores ajustados que deve manter a variável dentro dos limites de trabalho. Para facilitar tal trabalho, os controladores têm diversos tipos de controle, dentre os quais:
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188359
Engenharia Química e Química Industrial
Considere que o controlador usado no sistema representado no diagrama de blocos seja do tipo PI (proporcional + integral), cuja equação descritiva é dada por
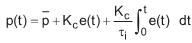
Para respostas do sistema à variação degrau, tanto na variável perturbadora como no valor de referência (set-point), com esse tipo de controlador, conclui-se que o(a)
Para respostas do sistema à variação degrau, tanto na variável perturbadora como no valor de referência (set-point), com esse tipo de controlador, conclui-se que o(a)
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188358
Engenharia Química e Química Industrial
A figura a seguir representa, em diagrama de blocos, um sistema com 3 funções de transferência  .
.
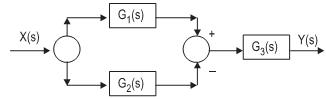
A função de transferência global entre Y(s) e X(s) é dada por
.A função de transferência global entre Y(s) e X(s) é dada por
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2011 - Petrobrás - Engenheiro de Processamento Júnior |
Q188356
Engenharia Química e Química Industrial
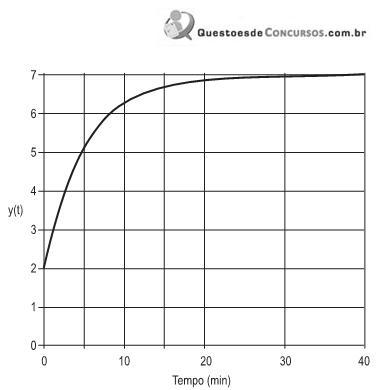
A figura acima representa a resposta da variável de saída y(t) a uma perturbação degrau de magnitude de 2 unidades na variável de entrada de um processo, a partir de um instante em que o processo estava em regime permanente. Com base nessas informações, a função de transferência desse processo é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Processamento Júnior |
Q181821
Engenharia Química e Química Industrial
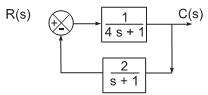
Para o diagrama de blocos, representado na figura acima, a função de transferência C(s) / R(s) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
PETROQUÍMICA SUAPE
Prova:
CESGRANRIO - 2011 - PETROQUÍMICA SUAPE - Engenheiro de Processamento Júnior |
Q181820
Engenharia Química e Química Industrial
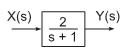
Se um sistema de primeira ordem, representado pelo diagrama de blocos acima, sofre uma perturbação degrau de 2 unidades em X, a resposta, no domínio do tempo de Y, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Processamento |
Q180260
Engenharia Química e Química Industrial
Sendo Gc a função de transferência do controlador, Gf, da válvula, Gp, do processo, e Gm, do elemento de medida, considere que um dado sistema apresenta função de transferência em malha aberta . Admita que KcK > 0 e den(s) é um polinômio em s de grau 3, com três raízes reais, distintas e negativas. Para esse sistema em malha aberta, há um único valor de frequência crítica ωc (para a qual o ângulo de fase vale -π rad). Sabe-se também que a razão de amplitudes de GMA na frequência ωc vale 0,5.
. Admita que KcK > 0 e den(s) é um polinômio em s de grau 3, com três raízes reais, distintas e negativas. Para esse sistema em malha aberta, há um único valor de frequência crítica ωc (para a qual o ângulo de fase vale -π rad). Sabe-se também que a razão de amplitudes de GMA na frequência ωc vale 0,5.
Em consequência, em malha fechada, o sistema será
. Admita que KcK > 0 e den(s) é um polinômio em s de grau 3, com três raízes reais, distintas e negativas. Para esse sistema em malha aberta, há um único valor de frequência crítica ωc (para a qual o ângulo de fase vale -π rad). Sabe-se também que a razão de amplitudes de GMA na frequência ωc vale 0,5. Em consequência, em malha fechada, o sistema será
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Processamento |
Q180259
Engenharia Química e Química Industrial
É conhecida a seguinte função de transferência em malha aberta (MA):  , tal que Gc denota a função de transferência do controlador, Gf, da válvula, Gp, do processo e Gm, do elemento de medida. O maior valor de ganho do controlador (Kc) para o qual o sistema não oscila em malha fechada, quando perturbado por degrau no set point, é
, tal que Gc denota a função de transferência do controlador, Gf, da válvula, Gp, do processo e Gm, do elemento de medida. O maior valor de ganho do controlador (Kc) para o qual o sistema não oscila em malha fechada, quando perturbado por degrau no set point, é
, tal que Gc denota a função de transferência do controlador, Gf, da válvula, Gp, do processo e Gm, do elemento de medida. O maior valor de ganho do controlador (Kc) para o qual o sistema não oscila em malha fechada, quando perturbado por degrau no set point, é