Questões de Concurso
Sobre modelagem, controle e instrumentação de processos químicos em engenharia química e química industrial
Foram encontradas 145 questões
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2018 - Petrobras - Engenheiro de Processamento Júnior |
Q1090845
Engenharia Química e Química Industrial
Um sistema linear é descrito por uma função de transferência que apresenta dois polos nulos e ganho unitário
positivo.
Se uma malha de realimentação negativa com um controlador do tipo proporcional for aplicada ao sistema, como será o comportamento do sistema em malha fechada?
Se uma malha de realimentação negativa com um controlador do tipo proporcional for aplicada ao sistema, como será o comportamento do sistema em malha fechada?
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2018 - Petrobras - Engenheiro de Processamento Júnior |
Q1090844
Engenharia Química e Química Industrial
Considere o sistema de controle em malha fechada dado
pelo diagrama de blocos a seguir:
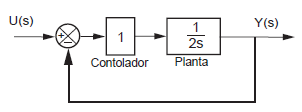
Qual será o erro em regime permanente para uma entrada do tipo rampa unitária?
Qual será o erro em regime permanente para uma entrada do tipo rampa unitária?
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2018 - Petrobras - Engenheiro de Processamento Júnior |
Q1090843
Engenharia Química e Química Industrial
Considere a função de transferência de um sistema dinâmico de 2a
ordem:
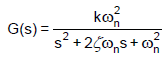
O valor inicial da resposta desse sistema para uma entrada doublê unitário, quando ele se encontra em repouso, é
O valor inicial da resposta desse sistema para uma entrada doublê unitário, quando ele se encontra em repouso, é
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2018 - Petrobras - Engenheiro de Processamento Júnior |
Q1090842
Engenharia Química e Química Industrial
A resposta a um sinal senoidal do sistema representado
pela função de transferência
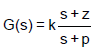
na qual k > 1 e z < p, para altas frequências da entrada, será
na qual k > 1 e z < p, para altas frequências da entrada, será
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2018 - Petrobras - Engenheiro de Processamento Júnior |
Q1090841
Engenharia Química e Química Industrial
Um sistema de controle que possui FTMA com um zero
positivo, para elevados ganhos da malha aberta, em malha fechada será
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2018 - Transpetro - Engenheiro Júnior - Processamento (Químico) |
Q1090298
Engenharia Química e Química Industrial
Duas funções de transferência de malha fechada que representam partes de um sistema industrial são dadas por
G1(s) e G2(s), que se apresentam abaixo.

Para controle dessas malhas, um engenheiro deve levar em consideração vários fatores, como estabilidade, margem de fase, ganho, entre outros.
Nesse caso, em relação às funções de transferência G1(s) e G2(s), tem-se o seguinte:
Para controle dessas malhas, um engenheiro deve levar em consideração vários fatores, como estabilidade, margem de fase, ganho, entre outros.
Nesse caso, em relação às funções de transferência G1(s) e G2(s), tem-se o seguinte:
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2018 - Transpetro - Engenheiro Júnior - Processamento (Químico) |
Q1090287
Engenharia Química e Química Industrial
Um sistema de medição de temperatura de um forno
apresenta uma função de transferência, como a ilustrada abaixo.
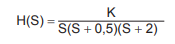
Qual o erro estático de posição do sistema, se a temperatura do forno permanecer constante e o ganho K for dobrado?
Qual o erro estático de posição do sistema, se a temperatura do forno permanecer constante e o ganho K for dobrado?
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2018 - Transpetro - Engenheiro Júnior - Processamento (Químico) |
Q1090286
Engenharia Química e Química Industrial
Um sistema de segunda ordem, cuja função de transferência é representada abaixo, possui frequência amortecida e tempo de pico iguais a 6 rad/s e 0,5236 s, respectivamente.
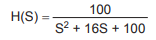
Qual o valor do tempo de acomodação do sistema para o critério de 2%?
Qual o valor do tempo de acomodação do sistema para o critério de 2%?
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2018 - Transpetro - Engenheiro Júnior - Processamento (Químico) |
Q1090284
Engenharia Química e Química Industrial
Um sistema, cuja função de transferência em cadeia aberta é de primeira ordem, apresenta constante de ganho
imprópria e polo igual a 6 e -2, respectivamente. Um engenheiro de processamento decide, então, colocar esse
sistema sob realimentação unitária negativa, objetivando
tornar o sistema mais rápido.
Qual o valor da nova constante de tempo do sistema?
Qual o valor da nova constante de tempo do sistema?
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2018 - Transpetro - Engenheiro Júnior - Processamento (Químico) |
Q1090282
Engenharia Química e Química Industrial
Um engenheiro de processamento precisa definir o ganho para um sistema de controle com retroalimentação
unitária negativa. Analisando o sistema para um ganho K
igual a 7, o engenheiro encontrou margens de fase e ganho iguais a 20o
e 10 dB.
Qual o limite para o aumento do ganho K, em dB, até que o sistema se torne instável?
Qual o limite para o aumento do ganho K, em dB, até que o sistema se torne instável?
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2018 - Transpetro - Engenheiro Júnior - Processamento (Químico) |
Q1090280
Engenharia Química e Química Industrial
Um engenheiro de processamento deseja modelar um sistema de nível, que trabalha em regime laminar. Sabe-se
que a equação diferencial desse sistema é RC  + h = Rqi e que qo = h/R,onde: R é a resistência ao fluxo de líquido
(constante); C é a capacitância do reservatório (constante);
h é uma pequena variação da altura do fluido em função de
uma pequena variação da taxa de escoamento q, sendo qi
e qo
pequenas variações na entrada e na saída do sistema,
respectivamente.
+ h = Rqi e que qo = h/R,onde: R é a resistência ao fluxo de líquido
(constante); C é a capacitância do reservatório (constante);
h é uma pequena variação da altura do fluido em função de
uma pequena variação da taxa de escoamento q, sendo qi
e qo
pequenas variações na entrada e na saída do sistema,
respectivamente.
Qual a função de transferência do sistema, no domínio da frequência, modelada por esse engenheiro?
+ h = Rqi e que qo = h/R,onde: R é a resistência ao fluxo de líquido
(constante); C é a capacitância do reservatório (constante);
h é uma pequena variação da altura do fluido em função de
uma pequena variação da taxa de escoamento q, sendo qi
e qo
pequenas variações na entrada e na saída do sistema,
respectivamente.
Qual a função de transferência do sistema, no domínio da frequência, modelada por esse engenheiro?
Ano: 2018
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2018 - Petrobras - Técnico Químico de Petróleo Júnior |
Q885263
Engenharia Química e Química Industrial
Uma carta de controle para um instrumento de medição é feita pelo estudo gráfico das medições periódicas realizadas usando um padrão ou amostra de controle que produz um valor medido, a priori conhecido.
NÃO constitui uma função da carta de controle
Ano: 2017
Banca:
IV - UFG
Órgão:
DEMAE - GO
Provas:
CS-UFG - 2017 - DEMAE - GO - Químico
|
CS-UFG - 2017 - DEMAE - GO - Engenheiro Químico |
Q2761126
Engenharia Química e Química Industrial
Considere a figura a seguir:
O gráfico representa o comportamento dinâmico de um sistema frente a uma perturbação do tipo degrau, sendo y o desvio do estado inicial. Desta forma, as curvas I, II e III representam, respectivamente, a ação de um controlador do tipo
Q1383332
Engenharia Química e Química Industrial
Sistema de controle, destinado à supervisão de processos com
poucas variáveis contínuas e discretas, dispersos em uma grande
área geográfica:
Ano: 2017
Banca:
IESES
Órgão:
CEGÁS
Prova:
IESES - 2017 - CEGÁS - Assistente Técnico - Técnico em Tecnologia da Informação |
Q788705
Engenharia Química e Química Industrial
Identifique a opção que preenche de forma correta o
enunciado abaixo:
Os Medidores de Vazão empregados em sistemas de
gás natural são geralmente do tipo turbina. Esta medição
envolve a correção simultânea dos parâmetros -
_________________, além da própria composição do
gás considerado. Para isso, o medidor conta com
transdutores de ________________, adaptados no seu
interior, além do dispositivo de medição de volume,
propriamente dito.
Ano: 2017
Banca:
IESES
Órgão:
CEGÁS
Prova:
IESES - 2017 - CEGÁS - Assistente Técnico - Administrativo e Financeiro |
Q788678
Engenharia Química e Química Industrial
Após a leitura do enunciado apresentado a seguir,
identifique a afirmação correta:
A válvula de bloqueio automático, ou válvula de bloqueio
por sobre pressão, tem a função de bloquear o fluxo do
gás, quando a pressão do sistema ultrapassar um valor
pré-definido, protegendo:
Ano: 2017
Banca:
FCM
Órgão:
IF-RJ
Prova:
FCM - 2017 - IF-RJ - Técnico Laboratório - Eletrotécnica/ Eletrônica / Instrumentação |
Q776988
Engenharia Química e Química Industrial
Analise o seguinte diagrama de blocos de um sistema de controle.
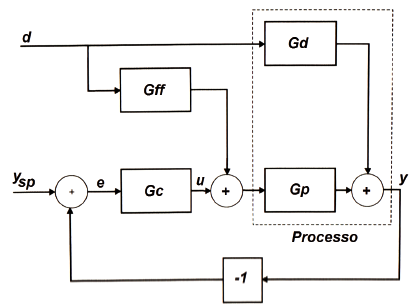
Nesse sistema, empregou-se a(s) estratégia(s) de controle
Ano: 2016
Banca:
AOCP
Órgão:
Prefeitura de Juiz de Fora - MG
Prova:
AOCP - 2016 - Prefeitura de Juiz de Fora - MG - Analista Ambiental - Engenheiro Químico |
Q1087693
Engenharia Química e Química Industrial
Assinale a alternativa que NÃO faz parte dos
elementos constituintes de um fluxograma de
processo (representação do projeto básico
do processo)?
Ano: 2016
Banca:
AOCP
Órgão:
Prefeitura de Juiz de Fora - MG
Prova:
AOCP - 2016 - Prefeitura de Juiz de Fora - MG - Analista Ambiental - Engenheiro Químico |
Q1087686
Engenharia Química e Química Industrial
Assinale a alternativa que melhor define a
principal função do sistema de controle de
processo em uma planta industrial.
Ano: 2016
Banca:
VUNESP
Órgão:
MPE-SP
Prova:
VUNESP - 2016 - MPE-SP - Analista Técnico Científico - Engenheiro Químico |
Q792994
Engenharia Química e Química Industrial
O controle estatístico de processos (CEP) é uma ferramenta
muito empregada para o acompanhamento da
produção. Foram analisados 3 gráficos de CEP, de 3 linhas
de produção diferentes, com 15 medidas cada uma,
sendo que:
• no gráfico I, as medidas estavam distribuídas aleatoriamente em torno da média e dentro dos limites superior e inferior; • no gráfico II, as medidas estavam entre o valor médio e o limite superior, com todas elas assumindo um comportamento descendente em direção ao valor médio; • no gráfico III, todas as medidas estavam entre o limite inferior e o valor médio, quase formando uma linha.
Assim, é correto afirmar que:
• no gráfico I, as medidas estavam distribuídas aleatoriamente em torno da média e dentro dos limites superior e inferior; • no gráfico II, as medidas estavam entre o valor médio e o limite superior, com todas elas assumindo um comportamento descendente em direção ao valor médio; • no gráfico III, todas as medidas estavam entre o limite inferior e o valor médio, quase formando uma linha.
Assim, é correto afirmar que: