Questões de Concurso Público INPE 2024 para Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais
Foram encontradas 45 questões
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521643
Engenharia Eletrônica
Para fins de realização de uma simulação computacional, uma
equipe de engenheiros obteve um modelo simplificado da dinâmica
de um satélite de comunicações, na forma de função de
transferência, a partir da seguinte equação diferencial:
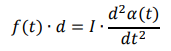
em que: f(t) = força de controle (entrada do modelo)
d = distância entre o ponto de aplicação da força de controle e o centro de massa
I = momento de inércia
a(t) = ângulo de orientação do satélite (saída do modelo)
Foram atribuídos os seguintes valores para os parâmetros do sistema: d = 1,2 m e I = 4.000 kgm².
A equipe analisou o comportamento do satélite sujeito a diferentes sinais de entrada.
Assinale a opção que contém a resposta temporal do modelo a dois pulsos sequenciais, com as seguintes características: um pulso de 20 N, em t = 10s, com uma pequena duração de apenas 0,1s e um outro pulso em t = 20s, com mesma duração e intensidade, mas com magnitude negativa. Os pulsos podem ser considerados como excitações impulsivas.
em que: f(t) = força de controle (entrada do modelo)
d = distância entre o ponto de aplicação da força de controle e o centro de massa
I = momento de inércia
a(t) = ângulo de orientação do satélite (saída do modelo)
Foram atribuídos os seguintes valores para os parâmetros do sistema: d = 1,2 m e I = 4.000 kgm².
A equipe analisou o comportamento do satélite sujeito a diferentes sinais de entrada.
Assinale a opção que contém a resposta temporal do modelo a dois pulsos sequenciais, com as seguintes características: um pulso de 20 N, em t = 10s, com uma pequena duração de apenas 0,1s e um outro pulso em t = 20s, com mesma duração e intensidade, mas com magnitude negativa. Os pulsos podem ser considerados como excitações impulsivas.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521644
Engenharia Aeronáutica
O controle de atitude é um dos diversos subsistemas que compõem
um satélite artificial, sendo responsável pela manutenção e/ou
alteração da altitude e posição do satélite. Para o seu correto
funcionamento é empregado um conjunto de sensores e atuadores,
propiciando ao satélite a capacidade de conhecer sua orientação e
posição no espaço e de corrigi-las, caso necessário.
Entre os diversos sensores que podem ser empregados na constituição desse sistema, um deles se baseia na detecção de radiação infravermelha para identificar a zona de transição entre a temperatura do espaço e da Terra.
Esse sensor é denominado
Entre os diversos sensores que podem ser empregados na constituição desse sistema, um deles se baseia na detecção de radiação infravermelha para identificar a zona de transição entre a temperatura do espaço e da Terra.
Esse sensor é denominado
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521645
Física
Considere que N termômetros meteorológicos são colocados em
certa região dentro de uma circunferência de raio R.
A probabilidade de a distância entre o centro da circunferência e o termômetro mais próximo ser maior que r, sendo r < R, é igual a
A probabilidade de a distância entre o centro da circunferência e o termômetro mais próximo ser maior que r, sendo r < R, é igual a
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521646
Estatística
Um pesquisador residente de uma cidade X, coleta dados ambientais
em 3 outras cidades, digamos, A, B e C. O pesquisador coleta dados
em cada cidade com probabilidade 0,5, 0,3 e 0,2, respectivamente.
As probabilidades de chover nas cidades A, B e C no dia de visita do
pesquisador são respectivamente de 0,01, 0,02 e 0,05.
Dado que choveu em um dia de visita do pesquisador, a probabilidade do pesquisador estar na cidade A é de, aproximadamente,
Dado que choveu em um dia de visita do pesquisador, a probabilidade do pesquisador estar na cidade A é de, aproximadamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521647
Estatística
Um instituto de pesquisas coletou três imagens de satélites por
sensores fotográficos. Cada imagem pode ter resolução Alta, Média
e Baixa. Sejam X e Y duas variáveis aleatórias que representam o
número de imagens coletadas com resolução alta e com resolução
baixa, respectivamente.
Considere as probabilidades conjuntas de X e Y dadas no quadro abaixo:
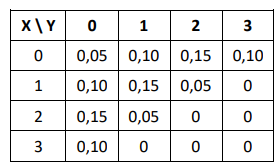
Determine a esperança condicional de X dado que Y = 1.
Considere as probabilidades conjuntas de X e Y dadas no quadro abaixo:
Determine a esperança condicional de X dado que Y = 1.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521648
Estatística
Considere uma variável aleatória X que representa o risco de
desastres geo-hidrológicos.
Suponha que X possa ser modelada através da seguinte função densidade de probabilidade:
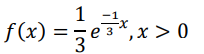
Determine a variância de X.
Suponha que X possa ser modelada através da seguinte função densidade de probabilidade:
Determine a variância de X.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521649
Estatística
Suponha que o número de lançamentos de satélites em órbita segueuma distribuição de Poisson com uma média de 6 por dia.
A probabilidade de que em um dia qualquer sejam lançados pelomenos 2 satélites é de
A probabilidade de que em um dia qualquer sejam lançados pelomenos 2 satélites é de
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521650
Matemática
Os quaternions são uma espécie de extensão dos números
complexos para três dimensões, muito utilizados na física e
engenharias, como por exemplo no equacionamento da orientação
de robôs manipuladores.
Considere os quaternions Q1 e Q2, dados por:
Q1 = 1 − i e Q2 = i − j + k.
Sabendo que o quaternion Q3 é dado por Q3 = Q1Q2, o módulo de Q3 é
Considere os quaternions Q1 e Q2, dados por:
Q1 = 1 − i e Q2 = i − j + k.
Sabendo que o quaternion Q3 é dado por Q3 = Q1Q2, o módulo de Q3 é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521651
Engenharia Eletrônica
Sistemas dinâmicos podem apresentar inúmeras realizações em
espaço de estado, onde todas apresentam mesma relação entradasaída. No entanto, algumas realizações contêm propriedades
peculiares, tais como a realização balanceada, largamente
empregada em algoritmos de redução de modelo como o
truncamento balanceado.
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521652
Matemática
Existe grande interesse no desenvolvimento de algoritmos mais
eficientes para cálculo de autovalores, sobretudo em matrizes
esparsas e de alta ordem, as quais naturalmente advém da
modelagem de sistemas dinâmicos reais de grande porte.
Nesse contexto, considere um sistema de grande porte representado por uma matriz P dada por:
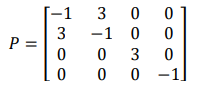
Um dos autovalores da matriz P é
Nesse contexto, considere um sistema de grande porte representado por uma matriz P dada por:
Um dos autovalores da matriz P é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521653
Matemática
A representação de sistemas dinâmicos por modelo de espaço de
estados estabelece um significado físico-conceitual às características
matemáticas das matrizes de estado que compõem tal modelo.
Nesse diapasão, ressalta-se os autovalores e autovetores da matriz
de estados, os quais estão intimamente ligados a caracterização da
dinâmica desse sistema.
Considere que um sistema dinâmico possui uma matriz de estado J, a qual é descrita a seguir:
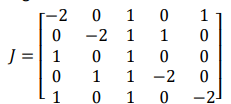
Sabe-se ainda que esta matriz possui um autovetor v, onde v = [0 −1 0 1 0].
Nessas condições, um dos autovalores da matriz
Considere que um sistema dinâmico possui uma matriz de estado J, a qual é descrita a seguir:
Sabe-se ainda que esta matriz possui um autovetor v, onde v = [0 −1 0 1 0].
Nessas condições, um dos autovalores da matriz
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521654
Matemática
Considere um sistema dinâmico, linear e invariante no tempo, decondições iniciais nulas, o qual é submetido a uma entrada forçada.
A resposta descrita pelos estados desse sistema depende de três aspectos: do sinal de entrada, da matriz de entrada e da matriz de transição de estados. Considerando que s é a variável de Laplace, I é a matriz identidade e A é a matriz de estados, a matriz de transição de estados Φ(s) desse sistema é
A resposta descrita pelos estados desse sistema depende de três aspectos: do sinal de entrada, da matriz de entrada e da matriz de transição de estados. Considerando que s é a variável de Laplace, I é a matriz identidade e A é a matriz de estados, a matriz de transição de estados Φ(s) desse sistema é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521655
Matemática
A resposta descrita pelos estados de um sistema dinâmico possui duas componentes: resposta natural e resposta forçada. De particular interesse é a resposta natural, a qual depende apenas da matriz de transição de estados Φ(t) e das condições iniciais desses estados. Considere um determinado sistema dinâmico linear e invariante no tempo, cuja matriz de estados pode ser fatorada em MLM⁻¹, onde as matrizes L e M são definidas por

A matriz de transição de estados (
A matriz de transição de estados (
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521656
Matemática
A modelagem matemática de diversos fenômenos físicos resulta em
equações ou sistemas de equações diferenciais ordinárias, cujos
métodos de solução são de grande interesse e aplicação para as
áreas de engenharias.
Considere que a modelagem das tensões em V em dois componentes de um circuito elétrico, denominadas VC(t) e VR(t), com respeito ao acionamento no instante inicial de uma fonte de tensão VEX(t) é dada pela seguinte equação:
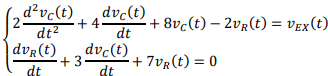
Sabendo que a fonte de tensão VEX(t) produz uma tensão constante de 10 V ao ser acionada, o equacionamento acima representado pode ser descrito por um sistema de equações diferenciais de 1ª ordem dado por:

Nessas condições, as matrizes A e B são, respectivamente,
Considere que a modelagem das tensões em V em dois componentes de um circuito elétrico, denominadas VC(t) e VR(t), com respeito ao acionamento no instante inicial de uma fonte de tensão VEX(t) é dada pela seguinte equação:
Sabendo que a fonte de tensão VEX(t) produz uma tensão constante de 10 V ao ser acionada, o equacionamento acima representado pode ser descrito por um sistema de equações diferenciais de 1ª ordem dado por:
Nessas condições, as matrizes A e B são, respectivamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521657
Engenharia Eletrônica
A transformada de Laplace é extensamente utilizada em sistemas de
controle, uma vez que os principais métodos clássicos de análise e
síntese são realizados no domínio da frequência. Corroborando com
essa prática, verifica-se que muitas características da resposta
temporal podem ser inferidas diretamente e até mais facilmente no
domínio da frequência, sem a necessidade de se computar a
transformada inversa de Laplace.
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:

Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:
Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521658
Engenharia Eletrônica
Um dos principais obstáculos na implementação de um controlador
por realimentação de estados é que raramente todos os estados de
uma planta real podem ser diretamente obtidos, onde muitas vezes
é até impossível o sensoriamento de alguns estados internos da
dinâmica em questão.
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521659
Engenharia Eletrônica
Desde que associado a um confiável e robusto observador de
estados, o controle por realimentação de estados observado
consegue alcançar especificações de desempenho geralmente
superiores as atingidas por controladores de realimentação de saída
sintetizados sob o paradigma do controle clássico.
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521660
Engenharia Eletrônica
Uma das grandes vantagens do controle por realimentação de
estados é a de garantir total controle da dinâmica do sistema,
permitindo alocar todos os polos do sistema em posições desejadas
pelo projetista, desde que o sistema em questão seja controlável.
Considere um sistema dinâmico em malha aberta dado pela seguinte
equação:

em que x1, x2 são estados e u a entrada.
Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
em que x1, x2 são estados e u a entrada.
Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521661
Engenharia Eletrônica
Do ponto de vista de sistemas de controle, processos industriais reais
geralmente são modelados por funções mais simplificadas, que
permitem um estudo do seu desempenho por métodos.
Considere que um processo industrial em malha fechada seja representado pela função de transferência P(s), dada por

Sabendo que a > 5b, a resposta de P(s) ao degrau unitário
Considere que um processo industrial em malha fechada seja representado pela função de transferência P(s), dada por
Sabendo que a > 5b, a resposta de P(s) ao degrau unitário
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Júnior I - Engenharia de Sistemas de Satélites - Missões Espaciais |
Q2521662
Engenharia Eletrônica
A realimentação unitária é uma das estruturas de controle mais
utilizadas para que um determinado sistema alcance o desempenho
desejado.
Considere um determinado sistema de controle, composto de um controlador em série com uma planta, onde a saída da planta é Y(s) e a entrada do controlador é a diferença entre a referência do sistema R(s) e a saída da planta Y(s).
Sabe-se ainda que tal sistema possui a função de transferência em malha fechada T(s), dada por

Nessas condições, a função de transferência em malha aberta desse sistema é
Considere um determinado sistema de controle, composto de um controlador em série com uma planta, onde a saída da planta é Y(s) e a entrada do controlador é a diferença entre a referência do sistema R(s) e a saída da planta Y(s).
Sabe-se ainda que tal sistema possui a função de transferência em malha fechada T(s), dada por
Nessas condições, a função de transferência em malha aberta desse sistema é