Questões de Concurso
Para inpe
Foram encontradas 1.885 questões
Resolva questões gratuitamente!
Junte-se a mais de 4 milhões de concurseiros!
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518305
Geografia
Modelos de previsão meteorológica utilizados em esquemas de
assimilação variacional como o 4D-VAR são, em geral, não-lineares e
complexos, implementados em grandes quantidades de linhas de
código de software. A implementação dos esquemas pode requerer,
ainda, os cálculos do Modelo Tangente Linear (Tangent Linear Model
- TLM) e do Modelo Adjunto, os quais podem, frequentemente, ser
computados de maneira eficiente.
O conjunto de técnicas utilizadas para computação eficiente dos modelos mencionados constituem ferramentas de
O conjunto de técnicas utilizadas para computação eficiente dos modelos mencionados constituem ferramentas de
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518304
Algoritmos e Estrutura de Dados
Em assimilação variacional, frequentemente são encontrados
problemas inversos mal-postos, (ill-posed problems). Esses
problemas podem ser convertidos em bem-postos (well-posed) pelo
uso de técnicas de regularização. Um exemplo é o uso da
regularização de Tikhonov, em que se adiciona um termo de
regularização a um funcional a ser minimizado, evitando-se assim
instabilidades numéricas durante o cálculo da solução.
Por exemplo: suponha que se busque um vetor x que resolva o sistema Hx = y, minimizando-se o funcional
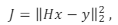
em que é a norma L2
(isto é, um problema de mínimos
quadrados mal-posto). Pode-se adicionar o termo de regularização
de Tikhonov ao funcional, substituindo-o por
é a norma L2
(isto é, um problema de mínimos
quadrados mal-posto). Pode-se adicionar o termo de regularização
de Tikhonov ao funcional, substituindo-o por

em que , e I é a matriz identidade.
, e I é a matriz identidade.
Considere um caso hipotético onde as variáveis H, y e α possuem os seguintes valores:
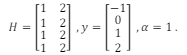
Neste caso, o vetor X que minimiza é:
é:
Por exemplo: suponha que se busque um vetor x que resolva o sistema Hx = y, minimizando-se o funcional
em que
é a norma L2
(isto é, um problema de mínimos
quadrados mal-posto). Pode-se adicionar o termo de regularização
de Tikhonov ao funcional, substituindo-o por em que
, e I é a matriz identidade. Considere um caso hipotético onde as variáveis H, y e α possuem os seguintes valores:
Neste caso, o vetor X que minimiza
é:
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518303
Algoritmos e Estrutura de Dados
Relacione os algoritmos de otimização utilizados em assimilação de
dados variacional com suas respectivas características
correspondentes.
1. Método de Newton
2. Broyden-Fletcher-Goldfarb-Shanno (BFGS)
3. Gradiente Conjugado
( ) Determina pontos cada vez mais próximos das soluções dos problemas de otimização mudando a direção de busca a cada iteração.
( ) Requer o cálculo das expressões fechadas dos gradientes e matrizes Hessianas a cada iteração.
( ) Utiliza aproximações de matrizes Hessianas e suas inversas para reduzir a carga computacional a cada iteração.
Assinale a opção que indica a relação correta, segundo a ordem apresentada.
1. Método de Newton
2. Broyden-Fletcher-Goldfarb-Shanno (BFGS)
3. Gradiente Conjugado
( ) Determina pontos cada vez mais próximos das soluções dos problemas de otimização mudando a direção de busca a cada iteração.
( ) Requer o cálculo das expressões fechadas dos gradientes e matrizes Hessianas a cada iteração.
( ) Utiliza aproximações de matrizes Hessianas e suas inversas para reduzir a carga computacional a cada iteração.
Assinale a opção que indica a relação correta, segundo a ordem apresentada.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518302
Algoritmos e Estrutura de Dados
Métodos de assimilação de dados clássicos são tradicionalmente
classificados em sequenciais ou variacionais. Os métodos
variacionais guardam semelhanças com a teoria de controle ótimo,
por sua vez desenvolvida a partir do estabelecimento dos
fundamentos do cálculo variacional.
Com relação à formulação variacional de assimilação de dados, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) Trata-se da busca por estados dos sistemas que minimizam um funcional de custo, em geral definido como um erro quadrático entre observações e predições correspondentes àqueles estados, calculadas por modelos matemáticos.
( ) Envolve a necessidade de aplicação de técnicas de localização e/ou inflação de covariâncias para eliminar correlações espurias entre possíveis soluções de problemas de otimização.
( ) Baseia-se em otimizações com restrições dinâmicas fortes, introduzidas no problema por uso de multiplicadores de Largrange; ou fracas, introduzidas no problema como termos ponderados de penalidades.
As afirmativas são, respectivamente,
Com relação à formulação variacional de assimilação de dados, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) Trata-se da busca por estados dos sistemas que minimizam um funcional de custo, em geral definido como um erro quadrático entre observações e predições correspondentes àqueles estados, calculadas por modelos matemáticos.
( ) Envolve a necessidade de aplicação de técnicas de localização e/ou inflação de covariâncias para eliminar correlações espurias entre possíveis soluções de problemas de otimização.
( ) Baseia-se em otimizações com restrições dinâmicas fortes, introduzidas no problema por uso de multiplicadores de Largrange; ou fracas, introduzidas no problema como termos ponderados de penalidades.
As afirmativas são, respectivamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518301
Algoritmos e Estrutura de Dados
O problema de previsão numérica de tempo em escala global é de
altíssima dimensionalidade, envolvendo, por exemplo,
representações de estados com centenas de milhões de variáveis.
Essa alta dimensionalidade impõe grandes dificuldades para a aplicação de filtros de partículas (PF) em problemas de assimilação de dados com muitas observações independentes, porque nessas situações o número de partículas necessárias para representar as distribuições de probabilidade cresce exponencialmente.
Técnicas recentemente desenvolvidas que visam contornar essas dificuldades baseiam-se em combinar filtros de partículas e filtros de Kalman por conjunto (EnKF), criando-se soluções híbridas PF-EnKF.
Assinale a opção que indica a principal vantagem de se utilizar filtros híbridos PF-EnKF.
Essa alta dimensionalidade impõe grandes dificuldades para a aplicação de filtros de partículas (PF) em problemas de assimilação de dados com muitas observações independentes, porque nessas situações o número de partículas necessárias para representar as distribuições de probabilidade cresce exponencialmente.
Técnicas recentemente desenvolvidas que visam contornar essas dificuldades baseiam-se em combinar filtros de partículas e filtros de Kalman por conjunto (EnKF), criando-se soluções híbridas PF-EnKF.
Assinale a opção que indica a principal vantagem de se utilizar filtros híbridos PF-EnKF.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518300
Algoritmos e Estrutura de Dados
A reamostragem em filtros de partículas pode ser realizada por meio
da criação de novas amostras retiradas das distribuições de
probabilidade discretas correspondentes a conjuntos de partículas e
suas configurações de pesos. No entanto, o fato de as novas
amostras serem criadas exatamente nos mesmos pontos do espaço
em que se localizam as partículas anteriores é inconveniente, pois
facilita o empobrecimento das partículas (i.e., o chamado particle
impoverishment).
Uma forma de produzir um novo conjunto de partículas em pontos distintos é substituir as distribuições discretas de probabilidade por aproximações contínuas e, somente então, realizar a reamostragem. A criação dessas aproximações se dá por meio de uma operação matemática entre a distribuição de probabilidade discreta e um kernel contínuo.
Nesse contexto, o processo de reamostragem em distribuições de probabilidade contínuas, que aproximam distribuições discretas correspondentes às configurações de partículas, é chamado de
Uma forma de produzir um novo conjunto de partículas em pontos distintos é substituir as distribuições discretas de probabilidade por aproximações contínuas e, somente então, realizar a reamostragem. A criação dessas aproximações se dá por meio de uma operação matemática entre a distribuição de probabilidade discreta e um kernel contínuo.
Nesse contexto, o processo de reamostragem em distribuições de probabilidade contínuas, que aproximam distribuições discretas correspondentes às configurações de partículas, é chamado de
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518299
Algoritmos e Estrutura de Dados
Filtros de partículas são, em geral, implementados com o uso de
reamostragem sequencial por importância. Essa reamostragem
pode ser adaptativa, ocorrendo apenas quando a métrica
denominada número efetivo de partículas é considerada muito
baixa.
Considerando um filtro de partículas com N partículas cujos pesos são dados por w(i) ,i = 1, … , N, a estimativa do número efetivo de partículas é dada por
Considerando um filtro de partículas com N partículas cujos pesos são dados por w(i) ,i = 1, … , N, a estimativa do número efetivo de partículas é dada por
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518298
Algoritmos e Estrutura de Dados
Filtros de Partículas são implementações não paramétricas de filtros
Bayesianos em que as distribuições de probabilidade não são
explicitamente definidas, sendo, portanto, representadas por um
conjunto de amostras provenientes delas próprias (denominadas
partículas).
Com relação aos filtros de partículas, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) As partículas representam observações (ou medidas) obtidas por sensores aplicados ao sistema em análise, e a elas são associados pesos proporcionais às suas probabilidades de coincidirem com medidas correspondentes ao estado verdadeiro do sistema.
( ) Quando aplicados à assimilação de dados, a cada passo de assimilação, novos pesos são atribuídos às partículas. Caso não seja realizado nenhum processo de reamostragem, o conjunto de partículas costuma degenerar-se, com uma das partículas recebendo peso normalizado próximo de 1 e as outras partículas recebendo pesos normalizados próximos de 0.
( ) São capazes de representar distribuições de probabilidade multimodais, isto é, cujas densidades de probabilidade possuem mais de um máximo local.
As afirmativas são, respectivamente,
Com relação aos filtros de partículas, analise as afirmativas a seguir e assinale (V) para a verdadeira e (F) para a falsa.
( ) As partículas representam observações (ou medidas) obtidas por sensores aplicados ao sistema em análise, e a elas são associados pesos proporcionais às suas probabilidades de coincidirem com medidas correspondentes ao estado verdadeiro do sistema.
( ) Quando aplicados à assimilação de dados, a cada passo de assimilação, novos pesos são atribuídos às partículas. Caso não seja realizado nenhum processo de reamostragem, o conjunto de partículas costuma degenerar-se, com uma das partículas recebendo peso normalizado próximo de 1 e as outras partículas recebendo pesos normalizados próximos de 0.
( ) São capazes de representar distribuições de probabilidade multimodais, isto é, cujas densidades de probabilidade possuem mais de um máximo local.
As afirmativas são, respectivamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518297
Algoritmos e Estrutura de Dados
Considere o modelo não linear e o Filtro de Kalman por Conjunto
(EnKF) detalhados na questão 04.
Para garantir estimativas de covariâncias não enviesadas, a matriz B pode ser calculada pela expressão:
Para garantir estimativas de covariâncias não enviesadas, a matriz B pode ser calculada pela expressão:
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518296
Algoritmos e Estrutura de Dados
Seja um modelo não linear dado por:

em que: xk é um vetor de estados de n dimensões em um dado instante de tempo K; M e H são mapeamentos não-lineares de Rn para Rn e de Rm para Rm, respectivamente; q e r são vetores aleatórios gaussianos de média nula e covariância Q e R, respectivamente.
Considere a implementação de um Filtro de Kalman por Conjunto (Ensemble Kalman Filter - EnKF) com 1000 pontos representando possíveis estados. Cada um dos 1000 pontos é denotado xt(i), onde i é inteiro e varia de 1 a 1000.
Considere, ainda, que a média dos pontos do conjunto no instante k pode ser representada por , e que o ganho de
Kalman no instante k é geralmente representado pelo produto de
uma matriz A pela inversa de uma matriz B (Kk = AB−1).
, e que o ganho de
Kalman no instante k é geralmente representado pelo produto de
uma matriz A pela inversa de uma matriz B (Kk = AB−1).
Considerando as condições enunciadas acima, para garantir estimativas de covariâncias não enviesadas, a matriz A pode ser calculada pela expressão:
em que: xk é um vetor de estados de n dimensões em um dado instante de tempo K; M e H são mapeamentos não-lineares de Rn para Rn e de Rm para Rm, respectivamente; q e r são vetores aleatórios gaussianos de média nula e covariância Q e R, respectivamente.
Considere a implementação de um Filtro de Kalman por Conjunto (Ensemble Kalman Filter - EnKF) com 1000 pontos representando possíveis estados. Cada um dos 1000 pontos é denotado xt(i), onde i é inteiro e varia de 1 a 1000.
Considere, ainda, que a média dos pontos do conjunto no instante k pode ser representada por
, e que o ganho de
Kalman no instante k é geralmente representado pelo produto de
uma matriz A pela inversa de uma matriz B (Kk = AB−1). Considerando as condições enunciadas acima, para garantir estimativas de covariâncias não enviesadas, a matriz A pode ser calculada pela expressão:
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518295
Algoritmos e Estrutura de Dados
O Filtro de Kalman por Conjunto, ou Ensemble Kalman Filter - EnKF,
representa uma alternativa ao Filtro de Kalman Clássico (KF) e ao
Filtro de Kalman Estendido (EKF) para a assimilação de dados
sequencial com grandes conjuntos de dados.
Entre as vantagens do EnKF com relação ao KF e ao EKF, destaca-se a
Entre as vantagens do EnKF com relação ao KF e ao EKF, destaca-se a
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518294
Algoritmos e Estrutura de Dados
A utilização de Filtros de Kalman clássicos (Kalman Filters - KF) ou
estendidos (Extended Kalman Filters - EKF) para a assimilação de
dados envolve dificuldades práticas.
Com relação a essas dificuldades, analise as afirmativas a seguir.
I. O EKF é o método otimizado para a assimilação de dados sequencial de um modelo dinâmico linear n-dimensional, sendo o KF apropriado apenas para sistemas unidimensionais.
II. O uso do KF e do EKF em modelos dinâmicos que contam com vetores de estados com muitas dimensões requer alta capacidade computacional e de armazenamento, tornando-os práticos apenas para modelos simplificados, de baixa dimensionalidade.
III. A linearização de modelos não lineares envolve a aproximação de funções matemáticas com o truncamento de séries, o que pode gerar erros de propagação de covariâncias, especialmente em modelos de alta dimensionalidade.
Está correto o que se afirma em
Com relação a essas dificuldades, analise as afirmativas a seguir.
I. O EKF é o método otimizado para a assimilação de dados sequencial de um modelo dinâmico linear n-dimensional, sendo o KF apropriado apenas para sistemas unidimensionais.
II. O uso do KF e do EKF em modelos dinâmicos que contam com vetores de estados com muitas dimensões requer alta capacidade computacional e de armazenamento, tornando-os práticos apenas para modelos simplificados, de baixa dimensionalidade.
III. A linearização de modelos não lineares envolve a aproximação de funções matemáticas com o truncamento de séries, o que pode gerar erros de propagação de covariâncias, especialmente em modelos de alta dimensionalidade.
Está correto o que se afirma em
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518293
Algoritmos e Estrutura de Dados
Filtros Bayesianos são métodos usados para estimar o estado de um
sistema dinâmico que seja observado por meio de medidas com
incertezas. Entre os algoritmos utilizados para implementação de
filtros Bayesianos, pode-se citar o Filtro de Kalman clássico, aplicável
a sistemas de modelos lineares e com distribuições Gaussianas de
probabilidade.
Nesse contexto, assinale a opção que indica uma das características do Filtro de Kalman clássico.
Nesse contexto, assinale a opção que indica uma das características do Filtro de Kalman clássico.
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518292
Algoritmos e Estrutura de Dados
Texto associado

Seja um modelo dinâmico discreto unidimensional de caminhada
aleatória dado por:
Em que xk e yk são, respectivamente, o estado a ser estimado e a
medição no tempo k. As variáveis aleatórias qk e rk possuem
distribuição normal com média nula e variâncias Q e R,
respectivamente, ambas iguais a 1. Assuma, ainda, que a distribuição
de probabilidade do estado no tempo k independe da distribuição
de probabilidade dos estados anteriores (i.e., o sistema atende à
propriedade de Markov).
Em um determinado instante de tempo k − 1, o estado estimado
por um filtro de Kalman é dado por 2,5 e sua variância é estimada
em 1,0.
No instante de tempo k, obtém-se uma medição igual a 3,1.
Após se agregar a informação proveniente da medição no tempo k,
o valor estimado da variância do estado para esse mesmo instante k
será
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518291
Algoritmos e Estrutura de Dados
Texto associado
Seja um modelo dinâmico discreto unidimensional de caminhada
aleatória dado por:
Em que xk e yk são, respectivamente, o estado a ser estimado e a
medição no tempo k. As variáveis aleatórias qk e rk possuem
distribuição normal com média nula e variâncias Q e R,
respectivamente, ambas iguais a 1. Assuma, ainda, que a distribuição
de probabilidade do estado no tempo k independe da distribuição
de probabilidade dos estados anteriores (i.e., o sistema atende à
propriedade de Markov).
Em um determinado instante de tempo k − 1, o estado estimado
por um filtro de Kalman é dado por 2,5 e sua variância é estimada
em 1,0.
No instante de tempo k, obtém-se uma medição igual a 3,1.
Após agregar a informação proveniente da medição no tempo k, o
valor estimado do estado para esse mesmo instante k será
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518290
Algoritmos e Estrutura de Dados
Texto associado
Seja um modelo dinâmico discreto unidimensional de caminhada
aleatória dado por:
Em que xk e yk são, respectivamente, o estado a ser estimado e a
medição no tempo k. As variáveis aleatórias qk e rk possuem
distribuição normal com média nula e variâncias Q e R,
respectivamente, ambas iguais a 1. Assuma, ainda, que a distribuição
de probabilidade do estado no tempo k independe da distribuição
de probabilidade dos estados anteriores (i.e., o sistema atende à
propriedade de Markov).
Em um determinado instante de tempo k − 1, o estado estimado
por um filtro de Kalman é dado por 2,5 e sua variância é estimada
em 1,0.
No instante de tempo k, obtém-se uma medição igual a 3,1.
Antes de agregar a informação proveniente da medição no tempo k,
a predição da variância do estado, para esse mesmo instante k, será
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518289
Algoritmos e Estrutura de Dados
Texto associado
Seja um modelo dinâmico discreto unidimensional de caminhada
aleatória dado por:
Em que xk e yk são, respectivamente, o estado a ser estimado e a
medição no tempo k. As variáveis aleatórias qk e rk possuem
distribuição normal com média nula e variâncias Q e R,
respectivamente, ambas iguais a 1. Assuma, ainda, que a distribuição
de probabilidade do estado no tempo k independe da distribuição
de probabilidade dos estados anteriores (i.e., o sistema atende à
propriedade de Markov).
Em um determinado instante de tempo k − 1, o estado estimado
por um filtro de Kalman é dado por 2,5 e sua variância é estimada
em 1,0.
No instante de tempo k, obtém-se uma medição igual a 3,1.
Nessas condições, antes de se agregar a informação proveniente da
medição no instante de tempo k, a predição do estado para esse
mesmo instante k será
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518288
Algoritmos e Estrutura de Dados
Os Filtros Bayesianos são assim chamados por basearem-se na
aplicação do Teorema de Bayes, que relaciona distribuições de
probabilidade a priori com distribuições de probabilidade a
posteriori.
Há dois passos fundamentais para a estimação de estados, onde o primeiro passo está associado ao modelo dinâmico do sistema ou processo, enquanto o segundo passo está associado ao modelo de observações ou sensoriamento.
Neste contexto, os passos são denominados, respectivamente,
Há dois passos fundamentais para a estimação de estados, onde o primeiro passo está associado ao modelo dinâmico do sistema ou processo, enquanto o segundo passo está associado ao modelo de observações ou sensoriamento.
Neste contexto, os passos são denominados, respectivamente,
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518287
Matemática
Foi ajustado um modelo para prever a precipitação média mensal de
chuvas para determinada região em função da temperatura média
mensal e da umidade média mensal
e da umidade média mensal
Suponha que o seguinte modelo foi obtido:

Supondo que o desvio padrão da temperatura média mensal é igual a 5 e o desvio padrão da umidade média mensal é igual a 4.
A propagação dos erros da precipitação média mensal é
e da umidade média mensal Suponha que o seguinte modelo foi obtido:
Supondo que o desvio padrão da temperatura média mensal é igual a 5 e o desvio padrão da umidade média mensal é igual a 4.
A propagação dos erros da precipitação média mensal é
Ano: 2024
Banca:
FGV
Órgão:
INPE
Prova:
FGV - 2024 - INPE - Tecnologista Pleno I - Desenvolvimento ou Aprimoramento de Sistema de Assimilação de Dados nas Componentes do Sistema Terrestre e de Aplicações para Monitoramento do Processo de Assimilação |
Q2518286
Algoritmos e Estrutura de Dados
Pesquisadores da área de sistema de assimilação de dados nas
componentes do sistema terrestre resolveram utilizar um método de
minimização variacional utilizando o algoritmo 3D-VAR para
encontrar a solução de um problema de otimização.
Sobre as propriedades numéricas do método utilizado, assinale a afirmativa correta.
Sobre as propriedades numéricas do método utilizado, assinale a afirmativa correta.