Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 607 questões
1. Sistema em malha aberta.
2. Sistema em malha fechada.
3. Sistema de 1ª ordem.
4. Sistema de 2ª ordem subamortecido.
5. Fator de amortecimento (ζ).
( ) Não utiliza realimentação para ajustar sua saída, sendo mais suscetível a erros causados por perturbações externas.
( ) Caracterizado por resposta com oscilação, onde o valor do fator de amortecimento é 0 < ζ< 1.
( ) Relação entre as características inerciais e dissipativas de um sistema, determinando se a resposta será oscilatória ou crítica.
( ) Utiliza realimentação para comparar a saída com a referência, ajustando o erro para garantir maior precisão.
( ) Representado por uma equação diferencial linear de 1ª ordem, possui resposta exponencial e tempo de acomodação diretamente relacionado à constante de tempo.
A sequência está correta em
1. Diagrama de rede PERT-COM.
2. Estrutura Analítica de Partição (EAP).
3. Curva S.
4. Análise de Risco.
5. Caminho Crítico.
( ) Ferramenta que identifica atividades cuja duração total não pode ser atrasada sem impactar diretamente a data final do projeto.
( ) Representação gráfica que compara o avanço planejado e o realizado, possibilitando identificar variações de desempenho ao longo do tempo.
( ) Técnica utilizada para decompor o projeto em componentes hierárquicos que facilitam o planejamento, a execução e o controle.
( ) Método que avalia a probabilidade de eventosincertos e seus impactos nos objetivos do projeto, incluindo prazos e custos.
( ) Gráfico de dependências entre atividades, permitindo calcular durações, folgas e identificar o caminho crítico.
A sequência está correta em
Considerando que um sistema linear tenha a função de transferência dada por G(s) = 3/ s(s + 2), julgue o próximo item, a respeito de teoria de controle.
O contorno de Nyquist para o sistema linear apresentado é representado corretamente a seguir.

Considerando que um sistema linear tenha a função de transferência dada por G(s) = 3/ s(s + 2), julgue o próximo item, a respeito de teoria de controle.
A propriedade da decomposição em sistemas lineares é a combinação das propriedades da homogeneidade e da aditividade.
Considerando que um sistema linear tenha a função de transferência dada por G(s) = 3/ s(s + 2), julgue o próximo item, a respeito de teoria de controle.
Na análise de uma transformada Z, é conveniente considerá-la unilateral, uma vez que a transformada bilateral pode não apresentar unicidade da transformada inversa.
Sistemas lineares e invariantes no tempo
têm fundamental importância nas áreas de processamento de sinais e sistemas de controle. Processamento de sinais é uma tecnologia que aplica
algoritmos computacionais em dados digitais para
a realização de operações específicas, tais como
filtragem digital de sinais, reconhecimento de voz,
tratamento de imagens, etc. Em processamento de
sinais, a resposta ao impulso de um sistema permite calcular a saída para qualquer sinal de entrada,
por meio da convolução deste com a resposta ao
impulso do sistema. Um sistema linear tem a seguinte relação para a entrada x[n] e a saída y[n]:
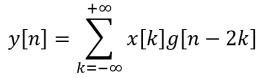
Encontre y[n] dado que os sinais x[n] = δ[n - 1] e g[n] = u[n] - u[n - 3]
Foi desenvolvido um equipamento de comunicação para funcionar como interfone, composto por
microfone, fone e microcontrolador. O microfone utilizado possui faixa de resposta de frequência entre
300 Hz e 15 kHz, conforme ilustrado abaixo, enquanto todo o circuito está cuidadosamente acomodado em
espaço sob medida, garantindo ajuste preciso dos componentes principais. Para garantir que apenas a voz
humana (geralmente na faixa de 300 Hz a 3,4 kHz) seja transmitida de forma eficiente e com qualidade,
é necessária uma filtragem adequada. Considerando o contexto do equipamento e suas características de
projeto, qual seria a solução mais estável e confiável para realizar essa filtragem?

Fonte: IFSP, 2024
Na indústria atual, um importante sistema
de controle é baseado nas técnicas proporcional,
integral e derivativa . Em alguns casos, esses métodos são utilizados isoladamente e, em algumas
aplicações, são utilizados conjuntamente. Sobre os
métodos de controle proporcional, integral e derivativo, podemos afirmar somente que:
Um carro de luxo foi desenvolvido com um
sistema que aquece o volante durante tempos de
frio, proporcionando maior conforto ao motorista.
O aquecimento é feito por uma resistência elétrica
que opera com tensão de 5 V. A bateria do veículo
fornece 12 V e, para garantir o aquecimento eficiente do volante, sem desperdício de energia, é
necessário escolher a solução mais adequada para
reduzir a tensão da bateria. Sabendo que a eficiência energética é uma prioridade em aplicações
automotivas, qual das opções abaixo é a correta
quanto ao procedimento mais indicado para alimentar o aquecedor do volante?
Considere o seguinte esquema elétrico de
um CLP, elaborado para implementar uma lógica
de selo no seu contato de saída Q2 para ligar/desligar uma lâmpada L1 por meio do acionamento das
chaves S1 e S2:
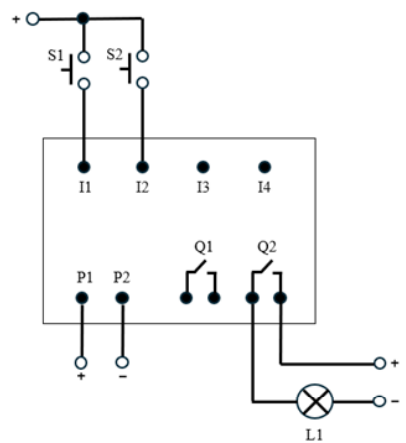
Fonte: IFSP, 2024
Qual alternativa a seguir ilustra um programa, em Linguagem de Programação Ladder, para implementar a lógica acima descrita?
Um determinado processo industrial pode
ser modelado através de um sistema linear em
diagrama em blocos representado na figura. Em
uma situação na qual o ganho do controlador seja
ajustado em K = 1, indique a alternativa que apresenta corretamente os polos de malha fechada e a
classificação do sistema quanto a sua estabilidade,
respectivamente.
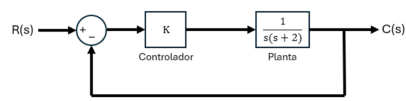
Fonte: IFSP, 2024.
Um dos critérios no estudo da qualidade de sistemas de controle em malha fechada é
o Erro de regime permanente, determinado por
Ereg = 
Deste modo, determine-o para o sistema de primeira ordem representado no diagrama de blocos a seguir considerando uma entrada de degrau unitário.
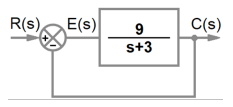
Fonte: IFSP, 2024
A modelagem matemática representa uma etapa importante em projetos de engenharia de controle
em que, após a aplicação das leis fundamentais, simplificações e aproximações, é possível determinar
uma equação matemática capaz de representar de
forma próxima o comportamento dinâmico de um
determinado sistema, seja ele térmico, mecânico,
elétrico ou hidráulico. Deste modo, dado o circuito
eletrônico a seguir, obtenha a função de transferência que represente seu comportamento dinâmico,
considerando o amplificador operacional ideal.
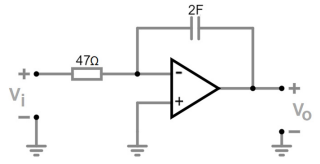
Fonte: IFSP, 2024
No estudo de sistemas de controle, nem sempre temos acesso fácil à função de transferência para
estudar a sua estabilidade. Uma técnica que pode ser utilizada neste caso é o levantamento experimental do
seu diagrama de bode.
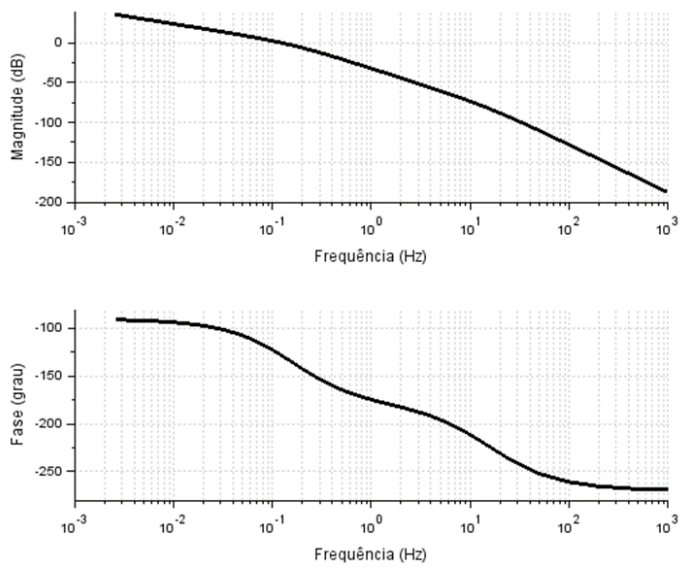
Fonte: IFSP, 2024
Considerando o diagrama de bode apresentado, determine a margem de ganho, margem de fase e a estabilidade deste sistema linear.
A figura a seguir representa um sistema de malha fechada constituído por um bloco com função de transferência G(s) no caminho direto e outro bloco com função de transferência H(s) na malha de realimentação. O sinal de entrada é denotado por X(s), e o de saída, por Y(s).
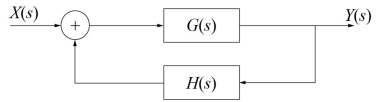
Na situação hipotética apresentada, a função de transferência de malha fechada, entre o sinal de saída e o sinal de entrada, é determinada por
Julgue o próximo item, relativo à teoria de controle.
O critério de Nyquist pode ser utilizado diretamente tanto
para sistemas contínuos quanto para sistemas discretos sem
qualquer modificação.