Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 595 questões
Ano: 2004
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE / CEBRASPE - 2004 - Polícia Federal - Engenheiro Eletricista |
Q2246692
Engenharia Eletrônica
Julgue o item a seguir, a respeito da aplicação de conversores D/A que são adequadamente ajustados para atuar no circuito de controle de um motor de corrente contínua.
À saída do conversor D/A pode ser inserido um circuito de potência transistorizado.
À saída do conversor D/A pode ser inserido um circuito de potência transistorizado.
Ano: 2004
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE / CEBRASPE - 2004 - Polícia Federal - Engenheiro Eletricista |
Q2246690
Engenharia Eletrônica
Microcomputadores e processadores digitais atualmente são largamente utilizados na indústria para controle de processos. A maioria dos sistemas industriais é de natureza analógica, requerendo assim o uso de conversores do tipo analógico-digital (A/D) e digital-analógico (D/A) a fim de se implementar processos de automação que utilizam microcomputadores e processadores digitais. Acerca desse assunto, julgue o item a seguir.
Sistemas de tempo discreto utilizam grandezas amostradas no tempo.
Sistemas de tempo discreto utilizam grandezas amostradas no tempo.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Técnico de Laboratório - Área: Automação |
Q2226747
Engenharia Eletrônica
– O que significa o termo "variável de processo", utilizado em sistemas de controle de
processos?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224295
Engenharia Eletrônica
Considere um sistema linear caracterizado pela seguinte função de transferência:
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Y(s) / U(s) = 2 / s3 + 6s2 + 11s + 6
Assumindo condições iniciais nulas, assinale a alternativa que corresponde às matrizes do modelo matemático do sistema em sua representação em espaço de estados.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224293
Engenharia Eletrônica
Sobre projeto de controladores discretos direto e por emulação, analise as assertivas
abaixo e assinale a alternativa correta.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
I. A técnica conhecida para projetar controladores diretamente no domínio do tempo discreto é conhecida como método direto como, por exemplo, o método de Tustin.
II. A técnica conhecida como emulação consiste em obter um equivalente discreto para um controlador contínuo já previamente projetado. Para isso, normalmente se utiliza o método de Euler ou o método do mapeamento de polos e zeros.
III. No projeto por emulação, a frequência de amostragem deve ser pelo menos duas vezes maior que a largura de faixa (ou largura de banda) do sistema em malha fechada a tempo contínuo de forma a atender o teorema da amostragem de Nyquist-Shannon. Caso contrário, ocorrerá o aliasing.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224289
Engenharia Eletrônica
Considere o diagrama de blocos da Figura 7 abaixo:
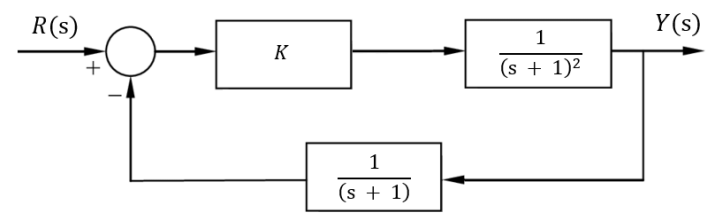
Figura 7
Assinale a alternativa que corresponde ao intervalo de valores de K que garante a estabilidade do
sistema em malha fechada.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224288
Engenharia Eletrônica
Com base na resposta ao degrau unitário abaixo (Figura 6), de um sistema de controle
em malha fechada, assinale a alternativa correta. 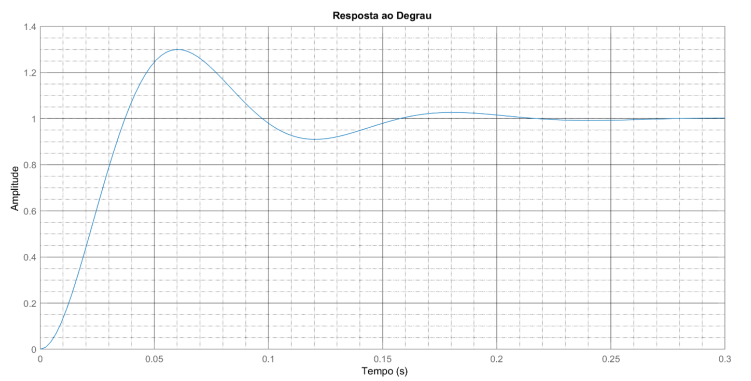
Figura 6
Figura 6
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224287
Engenharia Eletrônica
Considere o sistema de controle com retroalimentação unitária mostrado na Figura 5 abaixo:
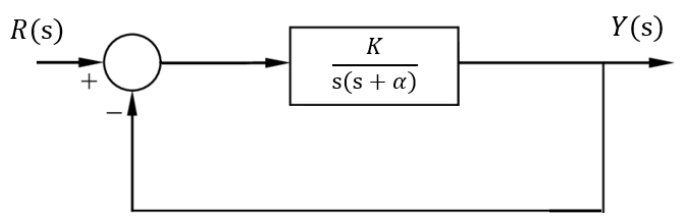
Figura 5
Determine os valores de K e α para os quais a resposta a um degrau unitário é subamortecida
(ζ = 0,5) e apresenta um tempo de 2 segundos para que as oscilações transitórias permaneçam
dentro de uma faixa de 2% em torno do valor final do regime permanente.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224286
Engenharia Eletrônica
Um tanque de líquido para refrigeração e um controlador/compensador estão em
série em uma malha de controle realimentada. Para controlar o nível do líquido no tanque, o
engenheiro responsável projetou um controlador/compensador, cuja função de transferência, C(s), é
dada por:
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo:
C(s) = 2 ( s + 4 / s + 8 )
Analisando a estrutura de C(s), pode-se afirmar que a compensação é do tipo:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224285
Engenharia Eletrônica
Sobre sistemas de controle, analise as assertivas abaixo e assinale a alternativa
correta.
I. Os compensadores por atraso de fase ou por avanço de fase são usualmente implementados com estruturas ativas.
II. Os sistemas de controle em malha aberta possuem maior rejeição a perturbações externas do que os sistemas em malha fechada.
III. Há uma melhoria maior no erro de estado estacionário se for usado um controlador Proporcional-Integral (PI) no lugar de um compensador por atraso de fase.
I. Os compensadores por atraso de fase ou por avanço de fase são usualmente implementados com estruturas ativas.
II. Os sistemas de controle em malha aberta possuem maior rejeição a perturbações externas do que os sistemas em malha fechada.
III. Há uma melhoria maior no erro de estado estacionário se for usado um controlador Proporcional-Integral (PI) no lugar de um compensador por atraso de fase.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224284
Engenharia Eletrônica
Para ajustar os parâmetros de um sistema de controle em malha fechada com
retroalimentação unitária do tipo PID, um engenheiro assumiu inicialmente somente a presença de
uma ação proporcional. Em seguida, ele variou o ganho proporcional de 0 até um valor Kc no qual era
possível observar que a saída atingia uma oscilação sustentada, ou seja, o sistema equivalente tinha
se tornado marginalmente estável. A partir de Kc e do período do sinal de saída, o engenheiro pôde
determinar os parâmetros do PID através de uma tabela. Nesse caso, o método de sintonia do PID
utilizado pelo engenheiro foi o método:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224283
Engenharia Eletrônica
É bem comum projetar sistemas de controle em malha fechada com base na combinação das ações proporcional e integral. De acordo com as características desse controlador, assinale a alternativa correta.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224282
Engenharia Eletrônica
Um sistema de controle em malha fechada do tipo
Proporcional-Integral-Derivativo (PID) com ganho proporcional, Kp , tempo integral, Ti
, e tempo
derivativo, Td , é proposto para uma planta, como pode ser observado no diagrama de blocos
(Figura 4) abaixo: 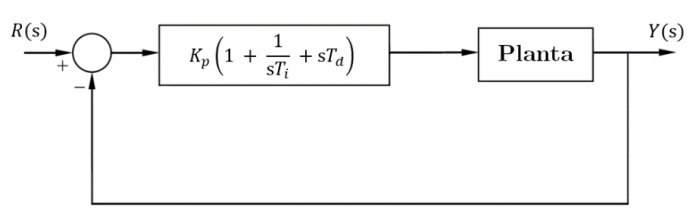
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224281
Engenharia Eletrônica
Obtenha a função de transferência equivalente, T(s) = Y(s)/R(s), para o sistema de
controle em malha fechada conforme Figura 3 abaixo: 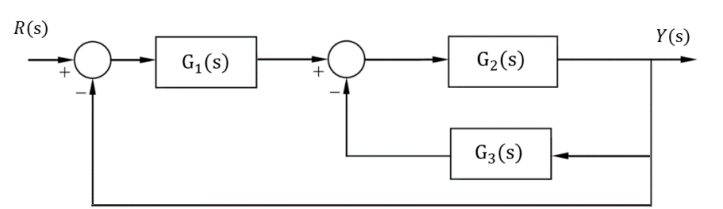
Figura 3
Figura 3
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224280
Engenharia Eletrônica
Considere um sistema em malha fechada de segunda ordem, cuja função de
transferência é dada por:
H(s) = ωn2 / s2 + 2ζωns + ωn2
Onde ωn e ζ são denominados de frequência natural e coeficiente de amortecimento, respectivamente. Acerca da natureza da resposta transitória desse sistema, analise as assertivas abaixo e assinale a alternativa correta.
I. O sistema apresenta uma resposta ao degrau unitário subamortecida se 0 < ζ < 1.
II. O sistema apresenta uma resposta ao degrau unitário oscilatória se ζ > 1.
III. Se o sistema possui polos com parte real negativa e iguais, a resposta ao degrau unitário será superamortecida.
H(s) = ωn2 / s2 + 2ζωns + ωn2
Onde ωn e ζ são denominados de frequência natural e coeficiente de amortecimento, respectivamente. Acerca da natureza da resposta transitória desse sistema, analise as assertivas abaixo e assinale a alternativa correta.
I. O sistema apresenta uma resposta ao degrau unitário subamortecida se 0 < ζ < 1.
II. O sistema apresenta uma resposta ao degrau unitário oscilatória se ζ > 1.
III. Se o sistema possui polos com parte real negativa e iguais, a resposta ao degrau unitário será superamortecida.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224279
Engenharia Eletrônica
Sobre a Transformada Z, analise as assertivas abaixo:
I. A Transformada Z é uma generalização da Transformada de Fourier de Tempo Discreto (DTFT).
II. A Transformada Z pode ser considerada como sendo a Transformada de Laplace com a mudança de variável z = esT.
III. A resposta ao impulso unitário de um sistema discreto é igual à sua função de transferência.
Quais estão corretas?
I. A Transformada Z é uma generalização da Transformada de Fourier de Tempo Discreto (DTFT).
II. A Transformada Z pode ser considerada como sendo a Transformada de Laplace com a mudança de variável z = esT.
III. A resposta ao impulso unitário de um sistema discreto é igual à sua função de transferência.
Quais estão corretas?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224276
Engenharia Eletrônica
Um engenheiro recebeu a tarefa de identificar os parâmetros de um sistema de primeira ordem dado por:
G(s) =k / τs + 1
Para isso, ele tem à disposição o diagrama de Bode (Figura 2) abaixo: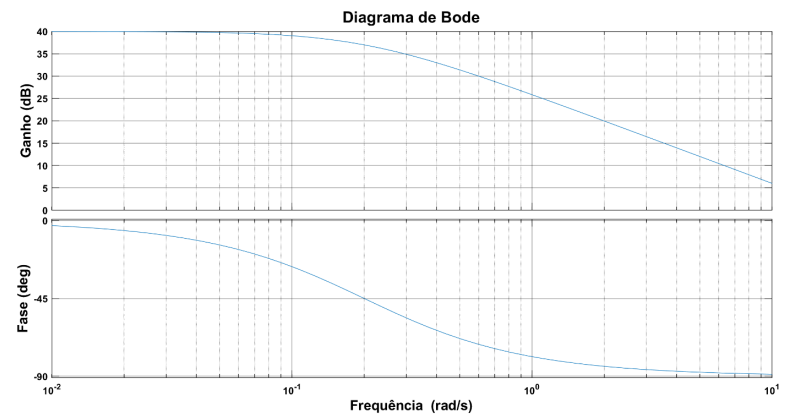
Figura 2
Os valores de τ e K são:
G(s) =k / τs + 1
Para isso, ele tem à disposição o diagrama de Bode (Figura 2) abaixo:
Figura 2
Os valores de τ e K são:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224275
Engenharia Eletrônica
Assumindo um degrau unitário como sinal de entrada, utilize o teorema do valor final
para determinar o valor que a saída do sistema caracterizado pela função de transferência abaixo
converge.
H(s) = s2 + 4s + 4 / s3 + 8s2 + 9s + 8
H(s) = s2 + 4s + 4 / s3 + 8s2 + 9s + 8
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224273
Engenharia Eletrônica
A partir do teorema da derivação da Transformada de Laplace, assinale a alternativa
com a solução da seguinte equação diferencial ordinária linear:
dy(t)/dt + 4y(t) = 3e −t , y(0) = 1
dy(t)/dt + 4y(t) = 3e −t , y(0) = 1
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224272
Engenharia Eletrônica
Em relação às propriedades da Transformada de Laplace, relacione a Coluna 1 à Coluna 2, associando os teoremas aos seus respectivos nomes.
Coluna 1 1. ℒ[a1f1(t) + a2f2(t)] = a1F1(s) + a2F2(s) 2. ℒ[e−atf(t)] = F(s + a) 3. ℒ[f(t − T)] = e−sTF(s) 4. ℒ[f(at)] = ⅟aF(s/a)
Coluna 2 ( ) Teorema do Deslocamento no Tempo.
( ) Teorema do Deslocamento na Frequência.
( ) Teorema do Fator de Escala.
( ) Teorema da Linearidade.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Coluna 1 1. ℒ[a1f1(t) + a2f2(t)] = a1F1(s) + a2F2(s) 2. ℒ[e−atf(t)] = F(s + a) 3. ℒ[f(t − T)] = e−sTF(s) 4. ℒ[f(at)] = ⅟aF(s/a)
Coluna 2 ( ) Teorema do Deslocamento no Tempo.
( ) Teorema do Deslocamento na Frequência.
( ) Teorema do Fator de Escala.
( ) Teorema da Linearidade.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é: