Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 609 questões
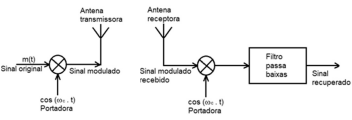
Para o sistema de comunicação sem fio no diagrama precedente, considere que: a modulação utilizada é AM-DSB, o sinal original é m(t) = 10.cos(30.2π.t) + 5.cos(100.2π.t), a frequência da portadora é ωc = 10.106.2π e a distância entre as duas antenas é de 1.000 m. Nessas condições, julgue o item a seguir.
Se a propagação for realizada através do espaço livre, com
linha de visada entre as antenas, então as perdas na
propagação pelo espaço livre serão superiores a 50 dB.
A função de transferência do controlador discreto resultante é
A função de transferência do compensador que atende a estas especificações é
Assinale a opção que corresponde ao gráfico de Boda da resposta em frequência do sistema.
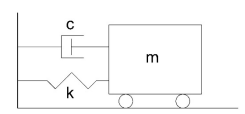
Nesse sistema, a frequência natural amortecida vale
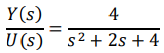
analise as afirmativas a seguir. I. A função é estável se todos os seus polos estiverem no semi-plano da esquerda. II. Para 2s positivo o sistema é estável. III. Para s = +1 ± j√3 o sistema é estável. Admitindo-se que 2s no denominador pode ser positivo ou negativo, está correto somente o que se afirma em
Um perito está envolvido com uma situação, descrita a seguir
• Uma máquina tem a especificação 220V//60Hz - 12kVA - cosφ = 0,62 e foi instalada em paralelo com um capacitor de 270μF.
• A proteção da instalação foi feita por meio de dois disjuntores de 50A, um para cada fase.
Com relação a essa situação, assinale V para verdadeiro e F
para falso.
( ) O valor da corrente total é igual a 39,5A.
( ) O valor do Fator de Potência dessa instalação é de 0,90.
( ) Se o terminal do capacitor se rompesse, a corrente aumentaria para 54,5A, desarmando o disjuntor, que teria que ser trocado, pois foi mal dimensionado. Com isso, o Fator de Potência diminuiria para 0,62, ficando a instalação sujeita à multa pelo baixo fator de potência.
As afirmativas são, respectivamente,
As figuras em (a) e em (b) ilustram dois tipos de antenas:
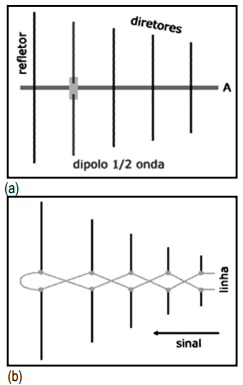
• Em (a) é uma antena formada por um dipolo de meia onda como elemento excitador, um refletor e um ou mais diretores. Pode ser implementada nas faixas de VHF e UHF, opera segundo a orientação mecânica dos seus elementos em polarização horizontal ou linear vertical, mediante a incorporação de uma segunda antena mecanicamente a 90ºe alimentada em quadratura de fase com a primeira. Embora possa ser usada para transmissão, não é adequada para altas potências devido ao efeito corona entre os elementos.
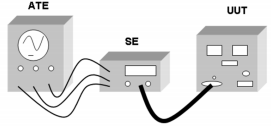
• Em (b) é uma antena com 5 elementos, com dipolos de comprimentos diferentes e espaçamentos diferentes, interligados de forma alternada e com um loop no final, que confere uma vantagem importante: a ampla faixa de frequências em que pode operar. Na prática, essas antenas podem ser construídas para operar em faixas de frequências da ordem de 2:1 ou mesmo superiores. Ganhos da ordem de6,5 a 10,5 dBi são comuns. Devido à elevada largura debanda, esse tipo é amplamente empregado na recepção de sinais de televisão aberta, evitando o uso de múltiplas antenas.
As antenas em (a) e (b) são conhecidas, respectivamente, por
 Fonte: Jones (2006)
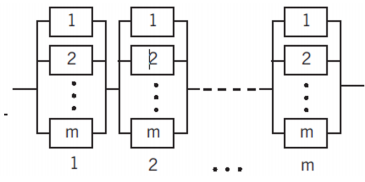
Fonte: Jones (2006) Com o propósito de reduzir o número de diferentes equipamentos necessários para testar um item de equipamento, deve-se:
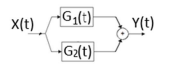
Fonte: Fogliatto e Ribeiro (2009)
Esse arranjo retrata um sistema:
O tipo de controle no qual a saída é um sinal K vezes maior do que a entrada e que os limites superior e inferior ao serem atingidos (saturação do sistema) são controlados, mas sem rejeitar completamente distúrbios e erros, é o controle
A figura a seguir apresenta o diagrama em blocos de um sistema linear invariante, no tempo composto pelos sistemas G1(t) e G2(t).
A saída deste sistema é
Analise os Sistemas Dinâmicos a seguir.
SISTEMA I: 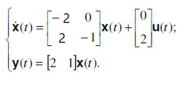
SISTEMA II: 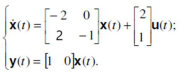
Sobre a controlabilidade e a observalidade desses sistemas, é correto afirmar que são, respectivamente,
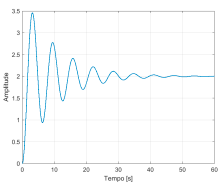
A função de transferência 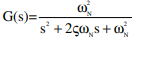 responde ao degrau unitário, conforme o gráfico a seguir.
responde ao degrau unitário, conforme o gráfico a seguir.
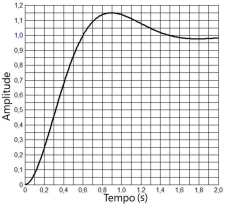
A esse respeito, analise as seguintes afirmativas.
I. A resposta do sistema apresenta um sobressinal de 15 %.
II.O tempo de subida é de 0,95 s.
III. Otempodeacomodaçãoéde1,6s. Está correto o que se apresenta em
A figura a seguir apresenta um sistema de controle em diagrama de blocos.
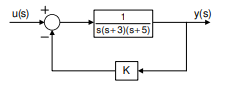
Assinale a opção que apresenta a equação característica desse
sistema.
Para um sistema de malha aberta, considere as afirmativas a seguir.
I. A adição de um zero na sua função de transferência provoca o deslocamento do lugar das raízes para a direita.
II. A adição de um polo na sua função de transferência diminui a estabilidade relativa e aumenta o tempo de acomodação do sistema.
III. A adição de um zero na sua função de transferência aumenta a estabilidade relativa e aumenta o tempo de acomodação do sistema.
Está correto o que se apresenta em

O baixo custo é uma das vantagens do controlador 1, que pode ser amplamente utilizado tanto em sistemas de controle industriais quanto domésticos.
A ação de controle do controlador 2 é denominada controle de taxa, visto que é proporcional à taxa de variação do sinal de erro atuante.