Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 595 questões
121
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894319
Engenharia Eletrônica
Em relação ao controle linear discreto, julgue o item que se segue.
A resposta ao degrau de um sistema discreto é igual à sua função de transferência.
A resposta ao degrau de um sistema discreto é igual à sua função de transferência.
122
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894318
Engenharia Eletrônica
Em relação ao controle linear discreto, julgue o item que se segue.
A transformada Z de um sinal amostrado é feita a partir da transformada de Laplace de uma sequência contínua.
A transformada Z de um sinal amostrado é feita a partir da transformada de Laplace de uma sequência contínua.
123
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894317
Engenharia Eletrônica
Em relação ao controle linear discreto, julgue o item que se
segue.
Um sistema possui estabilidade externa, BIBO (Bounded Input – Bounded Output), se uma sequência de entrada limitada produz uma sequência de saída ilimitada.
Um sistema possui estabilidade externa, BIBO (Bounded Input – Bounded Output), se uma sequência de entrada limitada produz uma sequência de saída ilimitada.
124
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894316
Engenharia Eletrônica
Em relação às características de sistemas em malha aberta e em malha fechada, julgue o próximo item.
Os sistemas de controle em malha fechada possuem maior rejeição a distúrbios que os sistemas em malha aberta.
Os sistemas de controle em malha fechada possuem maior rejeição a distúrbios que os sistemas em malha aberta.
125
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894315
Engenharia Eletrônica
Em relação às características de sistemas em malha aberta e em malha fechada, julgue o próximo item.
O ganho de um sistema de malha fechada é menor do que o do sistema de malha aberta.
O ganho de um sistema de malha fechada é menor do que o do sistema de malha aberta.
126
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894314
Engenharia Eletrônica
Em relação às características de sistemas em malha aberta e em
malha fechada, julgue o próximo item.
Nos sistemas de malha fechada, há um menor número de componentes que nos sistemas de malha aberta.
Nos sistemas de malha fechada, há um menor número de componentes que nos sistemas de malha aberta.
127
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894312
Engenharia Eletrônica

Considerando que o diagrama de blocos e a função de transferência, anteriormente apresentados, representam dois sistemas distintos, julgue o item seguinte.
No diagrama de blocos, a realimentação de u2 pode ser transferida para o primeiro nó, a partir da saída i0, inserindo-se um bloco com a função R2C1s e entrada negativa para o nó de ii.
No diagrama de blocos, a realimentação de u2 pode ser transferida para o primeiro nó, a partir da saída i0, inserindo-se um bloco com a função R2C1s e entrada negativa para o nó de ii.
128
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894309
Engenharia Eletrônica
Acerca das diversas tecnologias que permitem medir a pressão em determinado ponto de um sistema, julgue o item subsecutivo.
Uma das desvantagens dos sensores piezoelétricos é a sua grande dimensão, que os torna, consequentemente, de peso elevado, devido ao uso de materiais semicondutores.
Uma das desvantagens dos sensores piezoelétricos é a sua grande dimensão, que os torna, consequentemente, de peso elevado, devido ao uso de materiais semicondutores.
129
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894308
Engenharia Eletrônica
Acerca das diversas tecnologias que permitem medir a pressão em determinado ponto de um sistema, julgue o item subsecutivo.
Em um sensor capacitivo, a variação de pressão pode modular a frequência ou a amplitude do sinal de alimentação do dispositivo.
Em um sensor capacitivo, a variação de pressão pode modular a frequência ou a amplitude do sinal de alimentação do dispositivo.
130
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894306
Engenharia Eletrônica
Em relação a instrumentação industrial, julgue o item a seguir.
Os sensores ativos adicionam energia ao ambiente de medição e o sinal de excitação é modulado por um parâmetro do sensor.
Os sensores ativos adicionam energia ao ambiente de medição e o sinal de excitação é modulado por um parâmetro do sensor.
131
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894301
Engenharia Eletrônica
A respeito de sistema linear e invariante no tempo, julgue o próximo item.
A transformada Z bilateral considera as amostras atuais, passadas e futuras do sinal e, assim, o sistema é não causal.
A transformada Z bilateral considera as amostras atuais, passadas e futuras do sinal e, assim, o sistema é não causal.
132
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894300
Engenharia Eletrônica
A respeito de sistema linear e invariante no tempo, julgue o próximo item.
Se um sistema tem uma resposta ao impulso dada por h(t), então, ao se aplicar um sinal x(t) nesse sistema, a sua saída será a multiplicação entre x(t) e h(t).
Se um sistema tem uma resposta ao impulso dada por h(t), então, ao se aplicar um sinal x(t) nesse sistema, a sua saída será a multiplicação entre x(t) e h(t).
133
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Eletrônica |
Q1894297
Engenharia Eletrônica

Tendo como referência o circuito precedente, julgue o item subsequente.
A função de transferência do circuito em tela permanece inalterada se as posições do capacitor e do indutor forem invertidas, pois o sistema é linear e invariante no tempo.
A função de transferência do circuito em tela permanece inalterada se as posições do capacitor e do indutor forem invertidas, pois o sistema é linear e invariante no tempo.
134
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Petrobras
Prova:
CESPE / CEBRASPE - 2022 - Petrobras - Engenharia de Equipamentos – Elétrica |
Q1894142
Engenharia Eletrônica
Julgue o item seguinte, relacionado aos sistemas de controle.
A função de transferência de uma malha fechada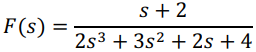 não possui polos com parte real positiva e, portanto, o
sistema é estável.
não possui polos com parte real positiva e, portanto, o
sistema é estável.
A função de transferência de uma malha fechada
não possui polos com parte real positiva e, portanto, o
sistema é estável.
135
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Eletricista |
Q1881249
Engenharia Eletrônica

Considerando o diagrama precedente, julgue o item que se
segue a respeito da teoria de engenharia de controle.
Caso um sistema de segunda ordem possua as duas raízes complexas, ele será sub-amortecido.
Caso um sistema de segunda ordem possua as duas raízes complexas, ele será sub-amortecido.
136
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Eletricista |
Q1881248
Engenharia Eletrônica
Considerando o diagrama precedente, julgue o item que se
segue a respeito da teoria de engenharia de controle.
A função de transferência em tela possui um polinômio de segunda ordem, tanto no numerador como no denominador.
A função de transferência em tela possui um polinômio de segunda ordem, tanto no numerador como no denominador.
137
Ano: 2022
Banca:
CESPE / CEBRASPE
Órgão:
Telebras
Prova:
CESPE / CEBRASPE - 2022 - Telebras - Especialista em Gestão de Telecomunicações – Engenheiro Eletricista |
Q1881237
Engenharia Eletrônica
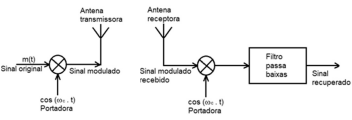
Para o sistema de comunicação sem fio no diagrama precedente, considere que: a modulação utilizada é AM-DSB, o sinal original é m(t) = 10.cos(30.2π.t) + 5.cos(100.2π.t), a frequência da portadora é ωc = 10.106.2π e a distância entre as duas antenas é de 1.000 m. Nessas condições, julgue o item a seguir.
Se a propagação for realizada através do espaço livre, com
linha de visada entre as antenas, então as perdas na
propagação pelo espaço livre serão superiores a 50 dB.
138
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847208
Engenharia Eletrônica
Um controlador PI com função de transferência D(s) = 3 + 15/s ௦
foi discretizado por obtenção de um equivalente discreto,
empregando-se o método de Tustin e taxa de amostragem de
0,2s.
A função de transferência do controlador discreto resultante é
A função de transferência do controlador discreto resultante é
139
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847206
Engenharia Eletrônica
Emprega-se um compensador com o objetivo de implementar a
ação derivativa de um controlador PID, em que o ganho
derivativo seja 0,3 numa faixa de frequência estreita em torno de
100 rad/s.
A função de transferência do compensador que atende a estas especificações é
A função de transferência do compensador que atende a estas especificações é
140
Ano: 2021
Banca:
FGV
Órgão:
IMBEL
Prova:
FGV - 2021 - IMBEL - Engenheiro Mecatrônico - Reaplicação |
Q1847205
Engenharia Eletrônica
A figura representa a resposta ao degrau unitário de um sistema
linear e invariante no tempo, estável, de segunda ordem e sem
zeros finitos.
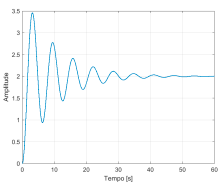
Assinale a opção que corresponde ao gráfico de Boda da resposta em frequência do sistema.
Assinale a opção que corresponde ao gráfico de Boda da resposta em frequência do sistema.