Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 609 questões
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Julgue o item a seguir, em relação a projeto de tubulação industrial e controle de processo.
Os sistemas digitais de controle distribuído coordenam
várias unidades de controle distribuídas em uma rede, em
vez de centralizar todas as operações em um único ponto.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Com base nessa situação hipotética, assinale a opção que corresponde ao instante, dado em minutos, contados desde o instante inicial, em que a massa de corante presente no tanque é igual a 30 kg.
Um filtro digital é caracterizado pela seguinte equação de diferenças:

em que x[n] é o sinal de entrada e y[n] é o sinal de saída.
Com base nessas informações, julgue o item a seguir.
O referido filtro é um sistema causal e estável.

Após análise do sistema, os zeros da função de transferência desse sistema de controle valem
Coluna 1
1. Tensão de linha.
2. Sequência de fase.
3. Gerador CA conectado em ∆.
4. Gerador trifásico conectado em Y.
5. Tensão de fase.
Coluna 2
( ) Tensão entre uma linha e um neutro de um gerador conectado em Y ou tensão entre duas linhas de um gerador em ∆.
( ) Os três condutores usados para conectar os terminais à carga do circuito são chamados de linhas.
( ) Ordem na qual as tensões senoidais produzidas por um gerador polifásico afetam a carga na qual estão conectadas.
( ) As tensões de fase e de linha são equivalentes e têm o mesmo valor que as tensões induzidas nos enrolamentos.
( ) Diferença de potencial que existe entre as linhas de um sistema monofásico ou polifásico.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
( ) Condutores de menor diâmetro podem ser usados para transmitir a mesma potência à mesma tensão, o que reduz a quantidade de cobre necessário (normalmente, cerca de 25% a menos) e, consequentemente, os custos de fabricação e manutenção das linhas.
( ) Linhas mais robustas são mais fáceis de instalar e suas torres de sustentação podem ser mais delgadas e mais espaçadas.
( ) Equipamentos e motores trifásicos apresentam melhores características de partida e operação que os sistemas monofásicos, pois a transferência de potência da fonte para a carga nos sistemas monofásicos está menos sujeita à flutuação do que nos sistemas trifásicos.
( ) Em geral, a grande maioria dos motores de grande porte é trifásica porque a partida não precisa de um projeto especial ou de circuitos externos adicionais.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
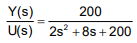
Ao ser aplicado um Impulso Unitário na entrada desse sistema, o sinal de saída oscilará na forma de uma senoide exponencialmente amortecida.
Dessa forma, pelo exposto acima, a constante conhecida como Razão de Amortecimento desse sistema vale
Um circuito elétrico é composto por uma fonte de tensão vF(t) que alimenta três componentes considerados ideais: um resistor de resistência R, um capacitor de capacitância C e um indutor de indutância L, todos associados em série. Fechando o circuito da fonte sobre esses três componentes ligados em série, uma corrente i(t) vai circular. A dinâmica desse sistema é regida por uma equação diferencial, obtida pela lei de Kirchoff, que relaciona a soma das tensões nesta malha: vF(t) = vR(t) + vC(t) + vL (t).
As relações entre as tensões e a corrente da malha são:

Com base nos dados, considerando-se todas as condições iniciais nulas, qual é a expressão da Função de Transferência,
no domínio de Laplace, que liga a corrente elétrica de saída com a tensão da fonte de alimentação, ou seja, a expressão
de 
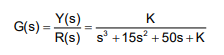
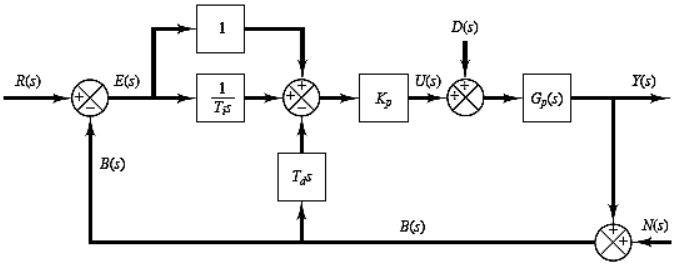
Esse modelo relaciona a saída Y(s) do sistema, com a entrada de referência R(s) e apresenta, no domínio do tempo, o sinal de saída y(t) em função do sinal de entrada r(t).
Variando-se positivamente o ganho K, chega-se a um determinado valor que provoca uma oscilação pura no sinal de saída y(t), ou seja, o sistema, em MF, passa a ter dois polos imaginários puros.
Qual é o valor do ganho K para obtenção dessa oscilação senoidal com valor de pico constante?
Com base nas transformadas de Laplace, julgue o próximo item.
Considere-se o problema de valor inicial a seguir, em que x(t) é uma entrada do sistema.
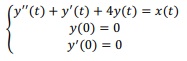
Nesse problema, a função de transferência é igual a  em que X(s) e Y(s) denotam, respectivamente, as
transformadas de Laplace de x(t) e y(t).
em que X(s) e Y(s) denotam, respectivamente, as
transformadas de Laplace de x(t) e y(t).
Com base nas transformadas de Laplace, julgue o próximo item.
Se F(s) = L(f(t)) é a transformada de Laplace de uma função derivável f(t) que satisfaz  , então a transformada de
Laplace de
, então a transformada de
Laplace de  é igual a 2 ∙ F(s) − 2.
é igual a 2 ∙ F(s) − 2.
Com base nas transformadas de Laplace, julgue o próximo item.
Um sistema de controle que tem função de transferência igual a  tem resposta f(t) estável.
tem resposta f(t) estável.
Um método gráfico de representação no plano complexo para a determinação da localização de todos os polos de malha fechada a partir do conhecimento da localização dos polos e zeros de malha aberta, quando um parâmetro (geralmente o ganho) varia de zero a infinito, é conhecido como: