Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 600 questões
Dada a função de transferência
G (s) = 1/ s2+s-12 , podemos afirmar que os polos são:
Considere a função de rede abaixo:
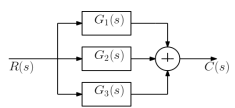
É correto afirmar que C(s) pode ser descrita pela expressão:
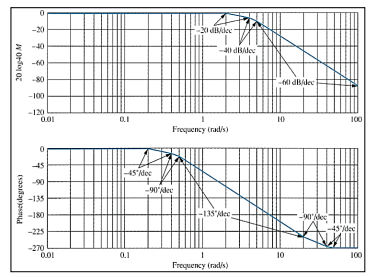
A faixa para a estabilidade é de, aproximadamente:
Analise a imagem e considere: Gc1 e Gc2 controladores PID e autovalores reais e distinto.
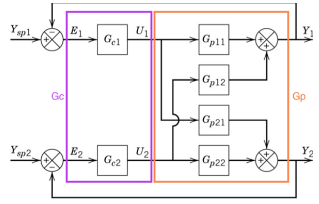
Para facilitar o ajuste dos controladores PID é necessário projetar uma realimentação de estados por alocação de polos, de forma que o sistema dinâmico equivalente no espaço de estados esteja na forma canônica:
Relacione adequadamente as colunas a seguir.
1. Método de relé em malha fechada.
2. Método do modelo interno.
3. Método do ganho e período críticos.
4. Preditor de Smith.
5. Comportamento servo.
6. Comportamento regulatório.
( ) Comportamento realizado pelo controlador do processo mediante distúrbios.
( ) Método utilizado para obter no limite da estabilidade os valores do ganho e período críticos, mas que é inviável em muitos casos na prática.
( ) Comportamento realizado para o controlador para “rastrear o setpoint”.
( ) Método utilizado para obter o ganho e o período crítico sem levar o sistema dinâmico ao limite da estabilidade.
( ) Método utilizado para se obter o controlador dado um desempenho requerido e um modelo da planta a se controlar.
( ) Minimiza os efeitos do tempo morto da planta no controle de malha.
A sequência correta está em
( ) Na prática, na maioria dos casos, deve-se buscar uma sintonia mais robusta para malhas de controle; portanto, aquelas obtidas para um degrau no setpoint costumam ser mais indicadas de modo geral.
( ) A ação derivativa do controlador PID é mais indicada para processos ruidosos.
( ) O controlador PID é mais indicado para ser utilizado em processos em que a razão de controlabilidade (ou incontrolabilidade para alguns autores) é maior do que 1.
( ) O método de sintonia de Cohen e Coon é mais indicado para processos com atraso de transporte (tempo morto) mais elevado.
( ) O modelo mais utilizado para métodos clássicos de sintonia de controladores PID é baseado no modelo de primeira ordem mais atraso de transporte (tempo morto).
A sequência correta está em
I. Tem quatro terminais, sendo: catodo, anodo, gate 1 e gate 2.
II. É usado em sistemas de corrente alternada e, em função da polarização do terminal gate, ele pode conduzir corrente de anodo para catodo ou de catodo para anodo.
III. É usado em sistemas de corrente alternada e, em função do instante do disparo pelo terminal gate, ele opera como um retificador controlado.
Está correto o que se afirma APENAS em
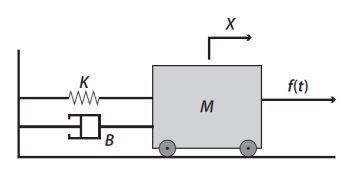
A equação de malha de um sistema elétrico, análoga ao sistema mecânico mostrado na figura ao lado, sendo u(t) a tensão de entrada, L um indutor, C um capacitor, R o resistor e q a carga elétrica armazenada, está corretamente representada em
Considere que esse sistema detecte corretamente a velocidade de um veículo quando a relação sinal-ruído é superior a 10 dB e que, entre outras condições, essa relação seja satisfeita quando o veículo tem área de seção transversal de radar igual a 0,2 m2 e está a distância máxima de 100 m da antena do sistema. Nessa situação, um veículo cuja seção transversal de radar é igual a 0,8 m2 pode ter a velocidade corretamente determinada se estiver a distância inferior a 200 m do sistema, desde que sejam mantidas todas as outras condições.
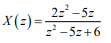 Os valores das três primeiras amostras da sequência x(n) , ou
seja,
Os valores das três primeiras amostras da sequência x(n) , ou
seja, 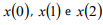 , respectivamente, são:
, respectivamente, são:  é a derivada do vetor de estados, y(t) é a saída e
u(t) é a entrada.
é a derivada do vetor de estados, y(t) é a saída e
u(t) é a entrada. 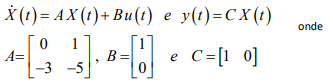
Utilizando-se uma realimentação de Estados com a lei de controle dada por:
 , em que K é o vetor de
ganhos e r(t) é uma entrada de referência, pretende-se alocar
seus dois polos de malha fechada nas posições reais
, em que K é o vetor de
ganhos e r(t) é uma entrada de referência, pretende-se alocar
seus dois polos de malha fechada nas posições reais  Para obter esse resultado, o valor do vetor de ganhos K é:
Para obter esse resultado, o valor do vetor de ganhos K é: 
O gráfico da figura a seguir mostra o traçado do Lugar das Raízes para esta planta sujeita a uma realimentação de saída com lei de controle:
 e o ganho K varia de zero a infinito.
e o ganho K varia de zero a infinito. 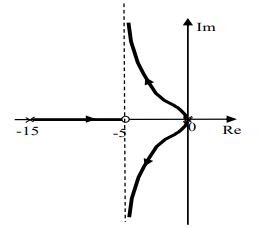
Um sistema contínuo, linear e modelado em espaço de estado, tem a sua dinâmica determinada pela seguinte equação matricial:

Onde u(t) é o sinal de entrada, X(t) é a derivada do vetor de estados e y(t) o sinal de saída. A planta dispõe de uma variável incerta, o parâmetro real k , em sua dinâmica. O valor de k que torna o sistema NÃO CONTROLÁVEL é
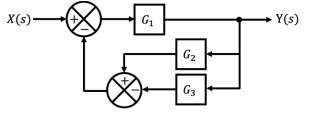
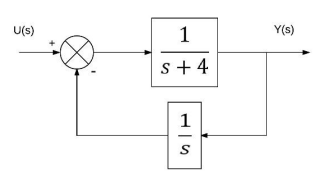
A função de transferência Y(s)/X(s) do sistema é igual a
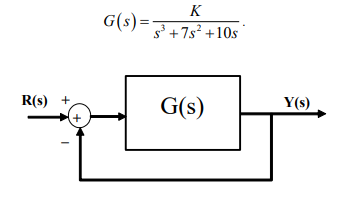
Para esta configuração em Malha Fechada, sabe-se que quando o valor do ganho K varia positivamente de 0 a infinito, o sistema em Malha Fechada entra em INSTABIIDADE a partir de um certo ganho. O valor do ganho no limiar da INSTABILIDADE é