Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 601 questões
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224284
Engenharia Eletrônica
Para ajustar os parâmetros de um sistema de controle em malha fechada com
retroalimentação unitária do tipo PID, um engenheiro assumiu inicialmente somente a presença de
uma ação proporcional. Em seguida, ele variou o ganho proporcional de 0 até um valor Kc no qual era
possível observar que a saída atingia uma oscilação sustentada, ou seja, o sistema equivalente tinha
se tornado marginalmente estável. A partir de Kc e do período do sinal de saída, o engenheiro pôde
determinar os parâmetros do PID através de uma tabela. Nesse caso, o método de sintonia do PID
utilizado pelo engenheiro foi o método:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224283
Engenharia Eletrônica
É bem comum projetar sistemas de controle em malha fechada com base na combinação das ações proporcional e integral. De acordo com as características desse controlador, assinale a alternativa correta.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224282
Engenharia Eletrônica
Um sistema de controle em malha fechada do tipo
Proporcional-Integral-Derivativo (PID) com ganho proporcional, Kp , tempo integral, Ti
, e tempo
derivativo, Td , é proposto para uma planta, como pode ser observado no diagrama de blocos
(Figura 4) abaixo: 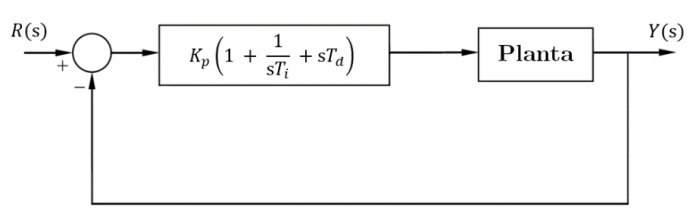
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
Figura 4
A lei de controle do controlador PID no domínio s, na figura acima, representa a realização do controlador PID na estrutura:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224281
Engenharia Eletrônica
Obtenha a função de transferência equivalente, T(s) = Y(s)/R(s), para o sistema de
controle em malha fechada conforme Figura 3 abaixo: 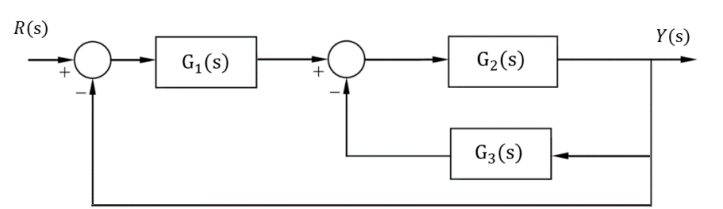
Figura 3
Figura 3
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224280
Engenharia Eletrônica
Considere um sistema em malha fechada de segunda ordem, cuja função de
transferência é dada por:
H(s) = ωn2 / s2 + 2ζωns + ωn2
Onde ωn e ζ são denominados de frequência natural e coeficiente de amortecimento, respectivamente. Acerca da natureza da resposta transitória desse sistema, analise as assertivas abaixo e assinale a alternativa correta.
I. O sistema apresenta uma resposta ao degrau unitário subamortecida se 0 < ζ < 1.
II. O sistema apresenta uma resposta ao degrau unitário oscilatória se ζ > 1.
III. Se o sistema possui polos com parte real negativa e iguais, a resposta ao degrau unitário será superamortecida.
H(s) = ωn2 / s2 + 2ζωns + ωn2
Onde ωn e ζ são denominados de frequência natural e coeficiente de amortecimento, respectivamente. Acerca da natureza da resposta transitória desse sistema, analise as assertivas abaixo e assinale a alternativa correta.
I. O sistema apresenta uma resposta ao degrau unitário subamortecida se 0 < ζ < 1.
II. O sistema apresenta uma resposta ao degrau unitário oscilatória se ζ > 1.
III. Se o sistema possui polos com parte real negativa e iguais, a resposta ao degrau unitário será superamortecida.
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224279
Engenharia Eletrônica
Sobre a Transformada Z, analise as assertivas abaixo:
I. A Transformada Z é uma generalização da Transformada de Fourier de Tempo Discreto (DTFT).
II. A Transformada Z pode ser considerada como sendo a Transformada de Laplace com a mudança de variável z = esT.
III. A resposta ao impulso unitário de um sistema discreto é igual à sua função de transferência.
Quais estão corretas?
I. A Transformada Z é uma generalização da Transformada de Fourier de Tempo Discreto (DTFT).
II. A Transformada Z pode ser considerada como sendo a Transformada de Laplace com a mudança de variável z = esT.
III. A resposta ao impulso unitário de um sistema discreto é igual à sua função de transferência.
Quais estão corretas?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224276
Engenharia Eletrônica
Um engenheiro recebeu a tarefa de identificar os parâmetros de um sistema de primeira ordem dado por:
G(s) =k / τs + 1
Para isso, ele tem à disposição o diagrama de Bode (Figura 2) abaixo: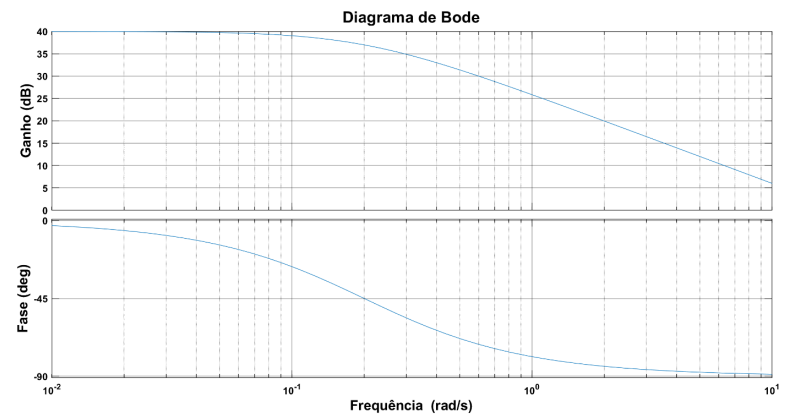
Figura 2
Os valores de τ e K são:
G(s) =k / τs + 1
Para isso, ele tem à disposição o diagrama de Bode (Figura 2) abaixo:
Figura 2
Os valores de τ e K são:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224275
Engenharia Eletrônica
Assumindo um degrau unitário como sinal de entrada, utilize o teorema do valor final
para determinar o valor que a saída do sistema caracterizado pela função de transferência abaixo
converge.
H(s) = s2 + 4s + 4 / s3 + 8s2 + 9s + 8
H(s) = s2 + 4s + 4 / s3 + 8s2 + 9s + 8
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224273
Engenharia Eletrônica
A partir do teorema da derivação da Transformada de Laplace, assinale a alternativa
com a solução da seguinte equação diferencial ordinária linear:
dy(t)/dt + 4y(t) = 3e −t , y(0) = 1
dy(t)/dt + 4y(t) = 3e −t , y(0) = 1
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224272
Engenharia Eletrônica
Em relação às propriedades da Transformada de Laplace, relacione a Coluna 1 à Coluna 2, associando os teoremas aos seus respectivos nomes.
Coluna 1 1. ℒ[a1f1(t) + a2f2(t)] = a1F1(s) + a2F2(s) 2. ℒ[e−atf(t)] = F(s + a) 3. ℒ[f(t − T)] = e−sTF(s) 4. ℒ[f(at)] = ⅟aF(s/a)
Coluna 2 ( ) Teorema do Deslocamento no Tempo.
( ) Teorema do Deslocamento na Frequência.
( ) Teorema do Fator de Escala.
( ) Teorema da Linearidade.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Coluna 1 1. ℒ[a1f1(t) + a2f2(t)] = a1F1(s) + a2F2(s) 2. ℒ[e−atf(t)] = F(s + a) 3. ℒ[f(t − T)] = e−sTF(s) 4. ℒ[f(at)] = ⅟aF(s/a)
Coluna 2 ( ) Teorema do Deslocamento no Tempo.
( ) Teorema do Deslocamento na Frequência.
( ) Teorema do Fator de Escala.
( ) Teorema da Linearidade.
A ordem correta de preenchimento dos parênteses, de cima para baixo, é:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Sistemas de Controle |
Q2224270
Engenharia Eletrônica
Para o circuito elétrico da Figura 1 abaixo, assinale a alternativa que representa a
equação diferencial que descreve a tensão no capacitor assumindo condições iniciais iguais a zero. 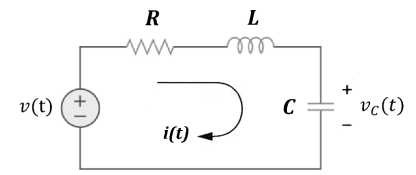
Figura 1
Figura 1
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223782
Engenharia Eletrônica
São processos para a geração de força eletromotriz (f.e.m):
1. Por atrito – Par termelétrico. 2. Por ação de luz – Gerador de Van Graff. 3. Por ação térmica – Geração fotovoltaica. 4. Por indução eletromagnética – Geradores elétricos. 5. Por compressão – Microfones.
O resultado da somatória dos números correspondentes às afirmações corretas é:
1. Por atrito – Par termelétrico. 2. Por ação de luz – Gerador de Van Graff. 3. Por ação térmica – Geração fotovoltaica. 4. Por indução eletromagnética – Geradores elétricos. 5. Por compressão – Microfones.
O resultado da somatória dos números correspondentes às afirmações corretas é:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223775
Engenharia Eletrônica
Um transformador de alta tensão típico, de núcleo de ferro, pode ser fornecido com
as seguintes especificações de dados:
4,6 kVA 2300 / 115 V 60 Hz
As tensões específicas (2300 V e 115 V) são as do primário e do secundário, mas não necessariamente nessa ordem, ou seja, se 2300 V for a tensão aplicada ao primário, a tensão no secundário será 115 V e vice-versa. A potência aparente especificada para esse transformador é de 4,6 kVA. Se a tensão no secundário for 115 V, qual será a corrente máxima na carga?
4,6 kVA 2300 / 115 V 60 Hz
As tensões específicas (2300 V e 115 V) são as do primário e do secundário, mas não necessariamente nessa ordem, ou seja, se 2300 V for a tensão aplicada ao primário, a tensão no secundário será 115 V e vice-versa. A potência aparente especificada para esse transformador é de 4,6 kVA. Se a tensão no secundário for 115 V, qual será a corrente máxima na carga?
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223773
Engenharia Eletrônica
Segundo Sadiku (2013), sua maior vantagem em relação ao transformador de dois
enrolamentos é sua habilidade em transferir potência aparente maior, além de ter dimensão e peso
menores. O trecho refere-se a um:
Ano: 2023
Banca:
FUNDATEC
Órgão:
IF-SC
Prova:
FUNDATEC - 2023 - IF-SC - Professor EBTT - Instrumentação Eletroeletrônica |
Q2223767
Engenharia Eletrônica
O arredondamento é o processo mediante o qual se eliminam algarismos menos
significativos em um valor medido. A equação a seguir apresenta a soma de três potências:
Pt = 20 W + 5,487 W + 8,75483 W
O valor do Pt, considerando o arredondamento para três casas decimais, é:
Pt = 20 W + 5,487 W + 8,75483 W
O valor do Pt, considerando o arredondamento para três casas decimais, é:
Ano: 2022
Banca:
FGV
Órgão:
Prefeitura de Manaus - AM
Prova:
FGV - 2022 - Prefeitura de Manaus - AM - Engenheiro Eletricista |
Q2219637
Engenharia Eletrônica
Considere as afirmativas a seguir, a respeito da função de
transferência de um sistema:
I. Quanto mais à esquerda estiver localizado o polo, mais lenta será a componente da resposta no tempo. II. Os zeros de uma função de transferência diminuem o efeito dos polos que estão próximos a ele. III. Zeros filtram variações bruscas do sinal de entrada e polos amplificam.
Está correto somente o que se apresenta em
I. Quanto mais à esquerda estiver localizado o polo, mais lenta será a componente da resposta no tempo. II. Os zeros de uma função de transferência diminuem o efeito dos polos que estão próximos a ele. III. Zeros filtram variações bruscas do sinal de entrada e polos amplificam.
Está correto somente o que se apresenta em
Ano: 2023
Banca:
FUNDATEC
Órgão:
PROCERGS
Prova:
FUNDATEC - 2023 - PROCERGS - ANT - Analista Técnico / Engenheiro Elétrico/Eletrônico |
Q2171769
Engenharia Eletrônica
São tipos de atenuação em fibra ópticas:
I. Perda por dispersão: causadas por propriedades do meio físico onde a fibra é lançada como água e metais. II. Perdas por espalhamento: mecanismos de perda intrínsecos causados pela interação de fótons com a sílica que compõe a fibra. III. Perdas por curvatura: perdas induzidas por um “stress” físico na fibra.
Quais estão corretas?
I. Perda por dispersão: causadas por propriedades do meio físico onde a fibra é lançada como água e metais. II. Perdas por espalhamento: mecanismos de perda intrínsecos causados pela interação de fótons com a sílica que compõe a fibra. III. Perdas por curvatura: perdas induzidas por um “stress” físico na fibra.
Quais estão corretas?
Ano: 2023
Banca:
FUNDATEC
Órgão:
PROCERGS
Prova:
FUNDATEC - 2023 - PROCERGS - ANT - Analista Técnico / Engenheiro Elétrico/Eletrônico |
Q2171757
Engenharia Eletrônica
Na Figura 2 abaixo, todos os pacotes seguem a rota "ACE", em vez de "ABDE" ou
"ACDE". Em algumas redes, todos os pacotes de uma determinada mensagem devem seguir a mesma
rota; em outras, cada pacote é roteado separadamente. É claro que, se "ACE" for a melhor rota, todos
os pacotes deverão ser enviados por ela, ainda que cada pacote seja roteado individualmente.
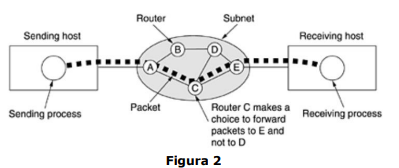
As decisões de roteamento são tomadas em caráter local. Quando um pacote chega ao roteador "A", cabe ao roteador "A" decidir se esse pacote deve ser enviado na linha para "B" ou na linha para "C". A forma como "A" toma essa decisão é chamada de:
I. Algoritmo de roteamento. II. Algoritmo de transporte. III. Tabela de roteamento.
Quais estão corretas?
As decisões de roteamento são tomadas em caráter local. Quando um pacote chega ao roteador "A", cabe ao roteador "A" decidir se esse pacote deve ser enviado na linha para "B" ou na linha para "C". A forma como "A" toma essa decisão é chamada de:
I. Algoritmo de roteamento. II. Algoritmo de transporte. III. Tabela de roteamento.
Quais estão corretas?
Ano: 2023
Banca:
IF-MG
Órgão:
IF-MG
Prova:
IF-MG - 2023 - IF-MG - Professor EBTT Área/Disciplina: Controle e Automação |
Q2171373
Engenharia Eletrônica
Dadas a implementação eletrônica de controladores e as possíveis respostas típicas dos elementos básicos de
controlador PID a entradas determinadas,
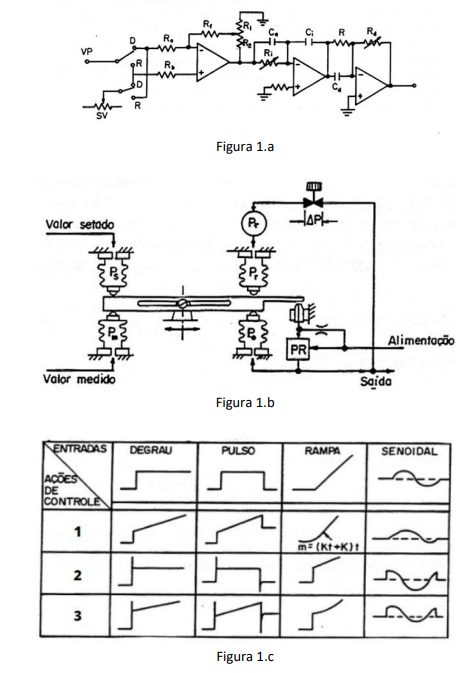
analise as seguintes afirmativas.
I. A implementação pneumática (Figura 1.b) é do controlador PID.
II. As implementações apresentadas (Figuras 1.a e 1.b) representam o mesmo controlador.
III. As respostas 3), 1) e 2) (Figura 1.c) são devidas às ações proporcional, proporcional-integral-derivativa e proporcional-integral.
IV. Nas respostas 1), 2) e 3) (Figura 1.c) não há ação derivativa.
V. A ação 2) (Figura 1.c) corresponde à ação proporcional-derivativa.
VI. A ação que corresponde à implementação pneumática (Figura 1.b) é ação 1) (Figura 1.c).
São corretas as afirmativas:
analise as seguintes afirmativas.
I. A implementação pneumática (Figura 1.b) é do controlador PID.
II. As implementações apresentadas (Figuras 1.a e 1.b) representam o mesmo controlador.
III. As respostas 3), 1) e 2) (Figura 1.c) são devidas às ações proporcional, proporcional-integral-derivativa e proporcional-integral.
IV. Nas respostas 1), 2) e 3) (Figura 1.c) não há ação derivativa.
V. A ação 2) (Figura 1.c) corresponde à ação proporcional-derivativa.
VI. A ação que corresponde à implementação pneumática (Figura 1.b) é ação 1) (Figura 1.c).
São corretas as afirmativas:
Ano: 2023
Banca:
FCC
Órgão:
Copergás - PE
Prova:
FCC - 2023 - Copergás - PE - Engenheiro Eletricista |
Q2164179
Engenharia Eletrônica
Texto associado
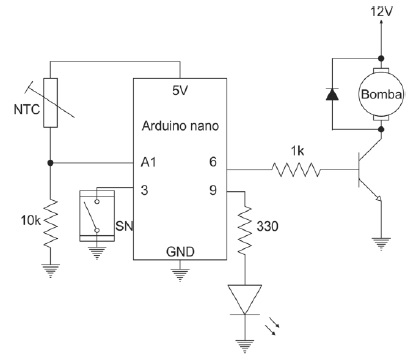
Para responder à questão, considere as informações a seguir.
O circuito sensor de temperatura, composto de um NTC e um resistor de 10 kΩ, envia uma tensão para o pino A1 do Arduino
Nano. O sistema irá operar em um ambiente em que a temperatura variará entre 20 e 40 °C. Nessa faixa de temperatura, o NTC se
comporta de forma que a sua resistência varia entre 500 Ω e 20 kΩ. O LED conectado ao pino 9 deve acender sempre que a
temperatura ultrapassa 30 °C.
O sensor de nível (SN), do tipo NA, está conectado ao pino 3, configurado no setup do código (sketch) como INPUT_PULLUP.
Ele está instalado na parte baixa do reservatório, de modo que será desativado sempre que o reservatório estiver quase vazio. Nesse
caso, a bomba deve acionar por 30 segundos, cuja vazão é suficiente para encher novamente o reservatório.
Considere o trecho genérico de fluxograma que pode ser usado no código (sketch) do sistema, conforme a seguir. 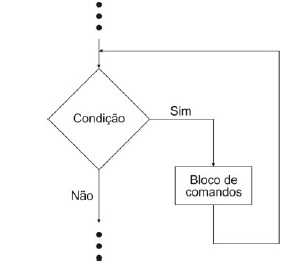
A estrutura de controle que ele representa é:
A estrutura de controle que ele representa é: