Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 609 questões
Julgue o próximo item, relativo à teoria de controle.
O critério de Nyquist pode ser utilizado diretamente tanto
para sistemas contínuos quanto para sistemas discretos sem
qualquer modificação.
Julgue o próximo item, relativo à teoria de controle.
Controles PID são inadequados para uso em sistemas não lineares, devido à sua estrutura linear.
Julgue o próximo item, relativo à teoria de controle.
Embora os diagramas de Bode forneçam apenas a resposta
em frequência e de fase de um sistema, ainda é possível
extrair desse diagrama informações úteis relativas à resposta
transitória do sistema.
Existem diversas técnicas para sintonia dos parâmetros desse tipo de controlador, a qual deve ser escolhida de acordo com as características do sistema como um todo.
Uma destas técnicas é o método
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta N(s), dada por
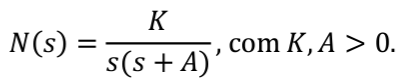
Inicialmente, o valor do ganho do controlador K foi ajustado de forma a tornar o sistema em malha fechada criticamente amortecido.
Caso o ganho K seja ligeiramente aumentado, é esperado que o sistema tenha
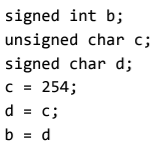
Após a execução desse trecho de código, o valor de b é
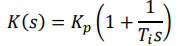
Após instalação do sistema, foi executado a função “autoajuste” presente no controlador PI, que estabeleceu um par de valores iniciais para as constantes Kp e Ti do respectivo controlador.
Em seguida, o sistema passou por um teste de validação, que consistiu na execução de um degrau na referência, com intuito de verificar como o sistema seguia a temperatura pré-determinada.
Ao analisar a resposta do sistema, verificou-se que a temperatura do forno possuía tempo de subida adequado, mas com tempo excessivo para eliminação de erro de estado estacionário.
Neste caso, para melhorar a resposta transitória desse sistema, se faz necessário
Considere um sistema de controle com realimentação unitária, cuja função de transferência de malha aberta possui um polo na origem.
Quanto ao erro de regime permanente ao seguir sinais do tipo degrau e rampa, esse sistema apresentará
Considere que determinado sistema de controle é representado pela sua função de transferência de malha aberta M(s), dada por

Com relação a estabilidade deste sistema, analise as afirmativas a seguir.
I. É independente do valor do parâmetro k.
II. É independente do valor do parâmetro a.
III. É independente dos valores dos parâmetros b e c.
Está correto o que se afirma em

em que x1, x2 são estados e u a entrada.
Após a inserção de um controlador por realimentação de estados de ganho K = [2 4] , o sistema em malha fechada passa a ter polos em
Com relação às características do controle por realimentação de estados observados de ordem completa, analise as afirmativas a seguir.
I. A dinâmica do observador não é observável do ponto de vista de entrada e saída da planta.
II. A ordem do controlador é sempre superior à ordem da planta.
III. O ganho do regulador interfere na alocação de polos da planta.
Está correto o que se afirma em
Uma maneira de contornar esse problema é fazer uso de um observador de estado de ordem completa, cuja matriz de ganhos do observador (comumente associada a letra L) tem a função de
Considere um sistema de controle que, após ser excitado por um sinal de banda estreita, produz um sinal de saída y(t) com a seguinte representação no domínio da frequência:

Os valores de y(t) para t = 0 e t → ∞ são, respectivamente,
Considere que um determinado sistema dinâmico possui uma realização em espaço de estados inicial, e que essa realização é “rotacionada” para uma nova realização através de uma matriz de transformação P.
Com relação à transformação de similaridade empregada na matriz de estado da realização inicial, analise as afirmativas a seguir.
I. Consiste na mudança das bases da matriz transformada.
II. Preserva autovalores da matriz transformada.
III. A matriz de transformação P deve ser unitária.
Está correto o que se afirma em
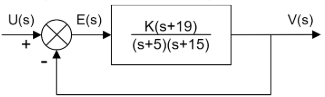
( ) Para K = 75, este sistema apresenta um erro de regime permanente de 5% em relação a entrada em degrau.
( ) Para K = 300 o erro de seguimento a uma entrada em rampa é de 2%.
( ) A constante de erro de velocidade é infinita, KV = ∞.
( ) Para esse sistema não há valor positivo de K que resulte em instabilidade.
As afirmativas são, respectivamente,
A medição de nível de líquidos e sólidos armazenados tem papel fundamental na indústria atual, com base nisso relacione as tecnologias de medição de nível com suas principais características.
1. Tipo Ultrassônico
2. Tipo Deslocador
3. Tipo Capacitivo
4. Tipo Radar
( ) Usado para fluídos limpos e não recomendado para líquidos viscosos, com sólidos em suspensão ou pastas. Não sofre influência de espumas ou vapores.
( ) Usa sinais de corrente de radiofrequência e depende das características elétricas do material sob medição e da geometria do tanque.
( ) Medição é afetada pela presença de bolhas ou espuma na superfície. Acúmulo de condensação e poeira no transdutor reduz a precisão. Não funciona em ambientes com vácuo ou alta pressão.
( ) Sem partes móveis e opera sem contato com o objeto a ser medido. Alcance limitado na medição de líquidos não condutivos.
Assinale a opção que indica a relação correta na ordem apresentada.
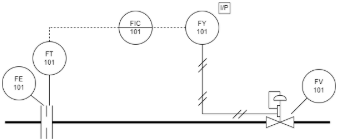
( ) O elemento final de controle de fluxo é acionado de forma pneumática e possui um posicionador.
( ) O controlador de fluxo está montado em um painel local, acessível ao operador.
( ) Toda comunicação entre transmissor, controlador e conversor é por meio de rede ethernet em protocolo Fieldbus.
( ) A principal função do conversor FY-101 é permitir controlar a porcentagem de abertura da válvula, invés de apenas se a válvula está aberta ou fechada.
As afirmativas são, respectivamente,
Utilize a figura a seguir para responder à questão.

A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.
Utilize a figura a seguir para responder à questão.
A figura ilustra um diagrama de blocos de um sistema linear
com realimentação negativa, sendo o ganho do percurso
direto igual a G(s) 2/S+3', e o ganho do percurso de
realimentação igual a H(s) = 1/S.