Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 600 questões

A saída y(t) é igual a:
As funções de transferência de três sistemas em malha-fechada são dadas, respectivamente, por
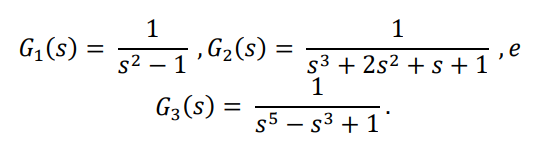
Com base no exposto, é correto afirmar que apenas
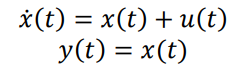
Considere o sistema linear apresentado. Sendo x a variável de estado, y a variável de saída, e u a entrada de controle, todas escalares e de valores no conjunto dos números reais, assinale a alternativa correta.
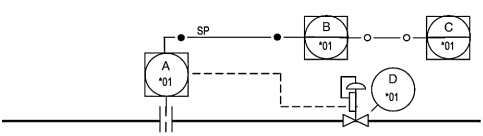
A norma ANSI/ISA 5.1 define a simbologia a ser aplicada na confecção de diagramas P&ID (Piping and Instrumentation Diagram).
Empregando-se a norma ISA 5.1 para representar um sistema que possua controle de vasão com uma rede de campo com transmissor/controlador e uma válvula com posicionador eletrônico, as letras A, B, C e D da figura correspondem, respectivamente a:
Com relação a sistemas de controle e processamento de sinais, julgue o item seguinte.
Se a função de transferência em malha fechada de um sistema
for 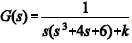 , ele será estável para - 20 < k < 0.
, ele será estável para - 20 < k < 0.

Considerando o diagrama de blocos precedente, que representa o transmissor de um sistema PCM, julgue o item a seguir.
Um codificador que utiliza a sinalização liga-desliga
desperdiça potência devido ao nível DC transmitido.
A figura abaixo mostra o controle da temperatura do ar em uma serpentina de aquecimento alimentada por água quente através de uma válvula. O sistema consiste em um transdutor de temperatura, um controlador e a válvula de água. A faixa de temperatura do transdutor é de 10 a 65 °C proporcionando uma faixa de pressão de 20 a 100 kPa. O controlador é ajustado para um ganho de 5 para 1 e a faixa de variação de mola da válvula da água quente é de 60 a 80 kPa:
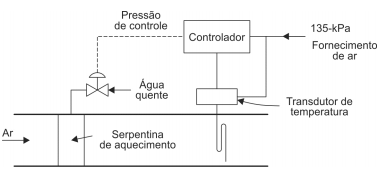
A faixa de pressão, em kPa, do transdutor de temperatura é:
A figura a seguir apresenta três curvas que correspondem às respostas de três funções de transferência. Relacione essas curvas com o fator de amortecimento ξ:
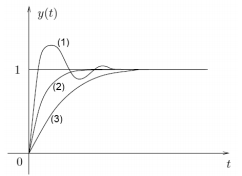
fator de amortecimento ξ:
( ) 0 < ξ < 1
( ) ξ < 1
( ) ξ = 1
Assinale a alternativa que mostra a relação correta, de cima para
baixo:
O seguinte diagrama representa uma malha de controle com realimentação:
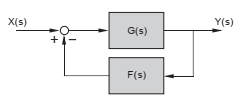
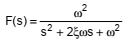
A função de transferência da malha é
Caso o valor de ξ seja igual a zero e seja aplicado um degrau unitário na entrada, o sistema
Considere o sistema de controle abaixo.
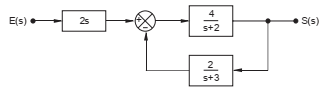
Os zeros da função de transferência do sistema valem
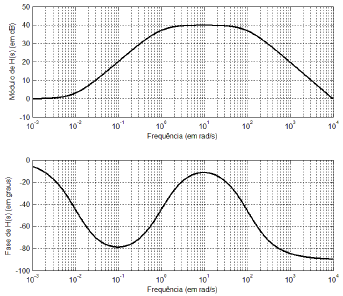
A partir da análise do gráfico, conclui-se que H(s)
O diagrama a seguir apresenta uma variante desse tipo de controlador, denominado aqui controlador modificado, a partir da modificação na estrutura clássica PID, onde:
• G(s) é a função de transferência de planta; • r(s), u(s), d(s) e y(s) são os sinais de entrada da referência, saída do controlador, entrada da perturbação e saída do sistema, respectivamente; • KP, TI e TD são os parâmetros do controlador modificado.
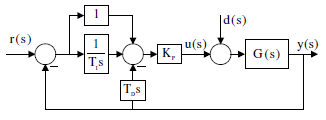
Uma das diferenças entre o controlador modificado e o controlador PID clássico é a capacidade que aquele tem de
Considere a resposta ao degrau unitário de um sistema dinâmico,
cuja função de transferência é dada por G(s) = 
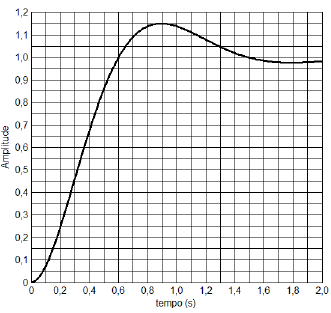
A partir da análise do gráfico, conclui-se que a resposta do
sistema apresenta
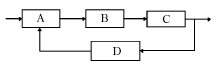
Os blocos A, B, C e D são, respectivamente, denominados de
A transformada de Laplace da função temporal dada abaixo é
ƒ(t) = e-t cos(100t)