Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 607 questões
A transformada de Laplace da função temporal dada abaixo é
ƒ(t) = e-t cos(100t)
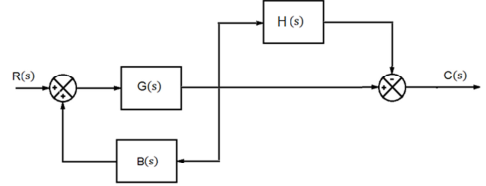
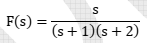
A função de transferência para o diagrama em blocos dado abaixo é
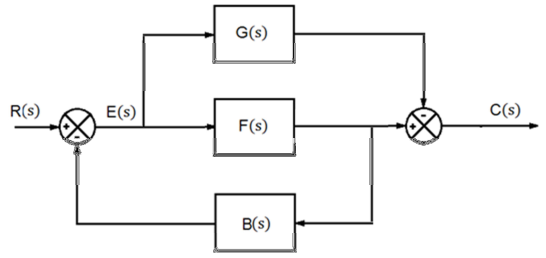
Para o sistema mostrado na figura abaixo, pode-se afirmar que a função de transferência de malha fechada C(s)/R(s) é
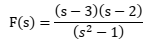
Na função de transferência abaixo, os zeros finitos desta função são
Em um sistema de controle de processo com retroalimentação, pode-se afirmar que:
I – o sinal de saída referente é sempre mensurado e comparado com o sinal de entrada de referência, possibilitando, assim, um ajuste do controle, tornando o processo mais estável;
II – o controle de processo por retroalimentação não depende do sinal de saída do processo;
III – o sinal de entrada é comparado com um valor de referência fixo, aumentando, assim, a estabilidade do sistema.
Está correto o que se afirma em
Quando se deseja analisar sistemas de controle em relação aos seus aspectos temporais, a transformada inversa de Laplace se faz necessária. Neste sentido, na função de transferência abaixo, no domínio da frequência, a fórmula que representa a equação no domínio do tempo é
No diagrama de blocos representado abaixo, verificam-se os componentes principais de um sistema de controle realimentado.
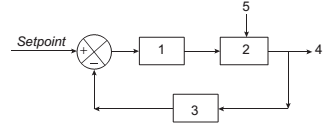
A sequência 1, 2, 3, 4 e 5 dos elementos indicados no
diagrama é, respectivamente,
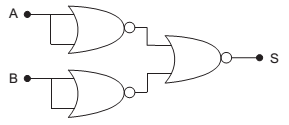
No diagrama Ladder acima, a saída S corresponde a
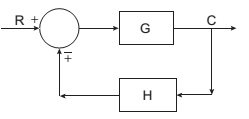
Um sistema de retroação unitária que pode ser apresentado
no lugar do sistema de retroação acima é:
O gráfico abaixo representa a resposta a uma dada alteração de carga.
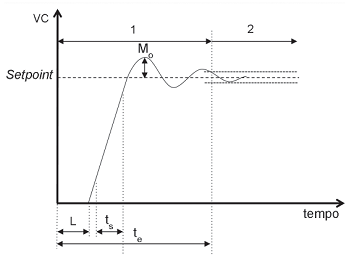
As inscrições nesse gráfico podem ser descritas:
A Figura abaixo é um diagrama de blocos representativo de um sistema de controle.
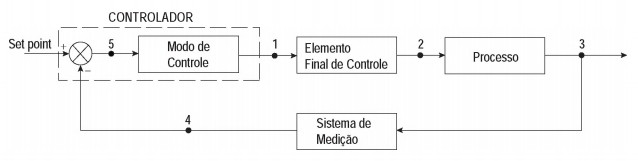
A variável manipulada e a variável controlada são aquelas presentes nos fluxos de sinal indicados, respectivamente, pelos
números
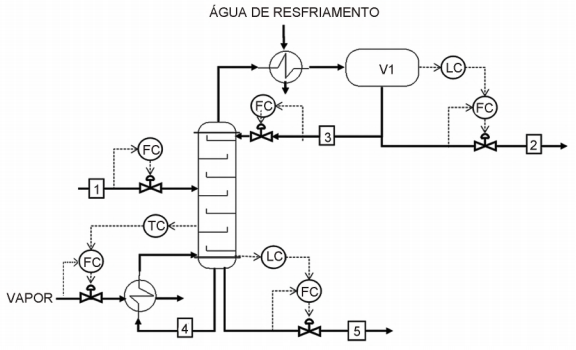
Na coluna representada na Figura, não havendo mudança de set points em relação à condição normal de operação, o resultado de um cenário de inundação da coluna tipicamente leva o operador a observar um
Um sistema de entrada única e saída única é representado em espaço de estado pela equação
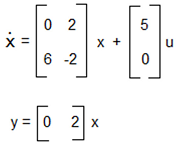
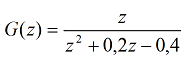
A função de transferência G(s) do sistema é:
Considerando que a função de transferência à Malha Fechada de um sistema de controle digital é dada pela expressão abaixo, assinale a alternativa correta quanto à condição de estabilidade do sistema e os valores dos polos.
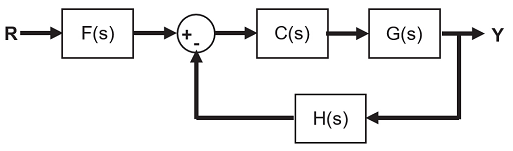
Determine a relação entre Y e R no sistema a seguir.
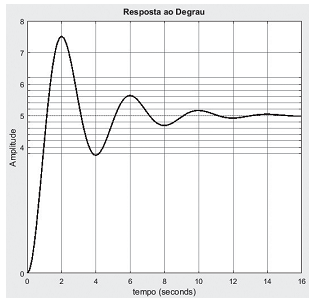
Dada a resposta ao degrau de um sistema dinâmico, determine os valores do sobressinal (Mp) e do tempo de acomodação (ta) para um critério de erro de 5%.
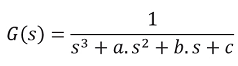
Utilize o método de Routh-Hurwitz para determinar os valores de a, b e c que garantem a estabilidade do sistema:
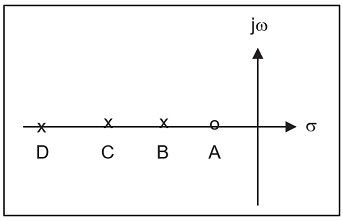
Considerando a distribuição de polos e zeros de um sistema em Malha Aberta no plano s, mostrada a seguir, indique o Lugar Geométrico das Raízes para o sistema em Malha Fechada.