Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 595 questões
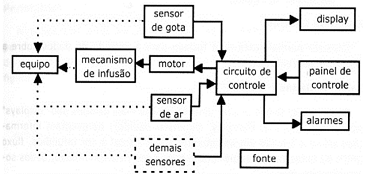
Qual equipamento está representado no seguinte diagrama em blocos?
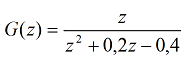
Considerando que a função de transferência à Malha Fechada de um sistema de controle digital é dada pela expressão abaixo, assinale a alternativa correta quanto à condição de estabilidade do sistema e os valores dos polos.
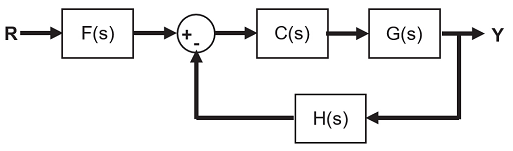
Determine a relação entre Y e R no sistema a seguir.
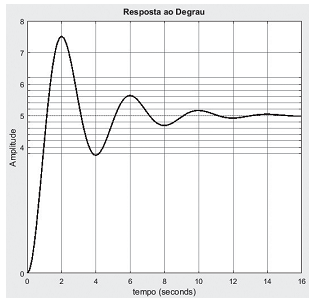
Dada a resposta ao degrau de um sistema dinâmico, determine os valores do sobressinal (Mp) e do tempo de acomodação (ta) para um critério de erro de 5%.
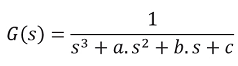
Utilize o método de Routh-Hurwitz para determinar os valores de a, b e c que garantem a estabilidade do sistema:
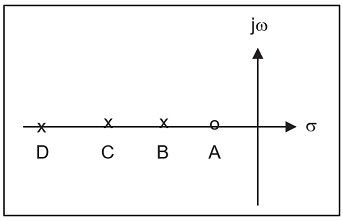
Considerando a distribuição de polos e zeros de um sistema em Malha Aberta no plano s, mostrada a seguir, indique o Lugar Geométrico das Raízes para o sistema em Malha Fechada.
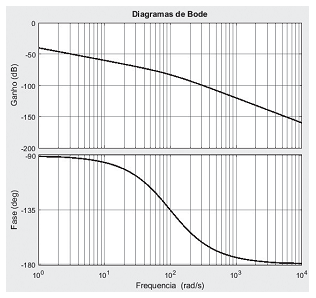
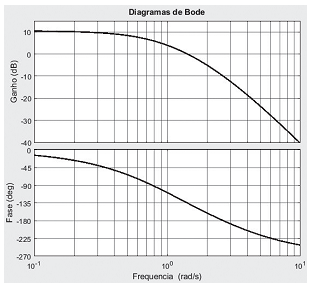
Considerando os Diagramas de Bode de um sistema de segunda ordem, mostrados abaixo, identifique os polos desse sistema.
Dados os Diagramas de Bode de um sistema de primeira ordem em Malha Aberta, determine
os valores de K e  da equação mostrada abaixo.
da equação mostrada abaixo.
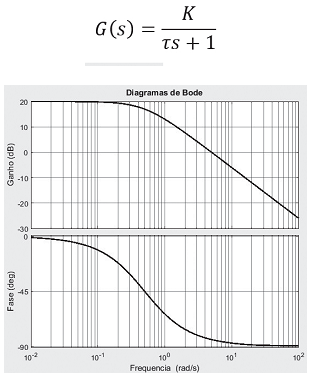
Os valores de K e  são:
são:
Determine as Margens de Ganho (MG) e de Fase (MF) nos diagramas de Bode em Malha Aberta e conclua sobre a estabilidade do sistema em Malha Fechada.

Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo, 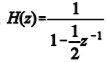 e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
A função de transferência do sistema de tempo contínuo é
expressa por 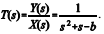
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é do tipo FIR (finite impulse
response, ou resposta finita ao impulso).
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro,  e G(s) = s – b, em que b é uma constante real. No segundo,
e G(s) = s – b, em que b é uma constante real. No segundo,  e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo discreto é estável.
Os diagramas de bloco ilustrados acima representam sistemas lineares com realimentação negativa: o primeiro é um sistema de tempo contínuo e o segundo, de tempo discreto. No primeiro, e G(s) = s – b, em que b é uma constante real. No segundo, e G(z) = 1 – z–1. A respeito desses sistemas, julgue o item subsecutivo.
O sistema de tempo contínuo será instável se b for maior
que –1.
Considerando que, em condições de contorno iniciais nulas, um sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 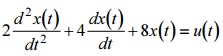 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
No domínio da frequência, esse sistema apresenta dois polos
complexos conjugados e um único zero finito.
Considerando que, em condições de contorno iniciais nulas, um
sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 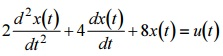 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
Considere a situação em que todas as variáveis do sistema
devam ser convertidas do modo contínuo para o discreto.
Nesse caso, a frequência mínima para amostragem do sinal
deverá ser superior a 0,40 Hz.
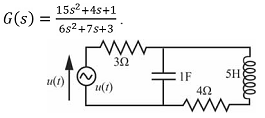
Julgue o item subsecutivo, a respeito da teoria de controle.
A função de transferência entre a corrente e a fonte de tensão do circuito mostrado na figura abaixo é dada por
Julgue o item subsecutivo, a respeito da teoria de controle.
A representação no espaço de estados de um modelo
matemático descrito por uma equação diferencial de ordem n
consiste em um sistema de n equações diferenciais de primeira
ordem.
Julgue o item subsecutivo, a respeito da teoria de controle.
Basta uma única variável de estado para descrever
completamente a dinâmica de um sistema linear de segunda
ordem.