Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 607 questões

Assim, dada a equação característica, representada pelo polinômio p(s) =2s3 +2s2 +3s+6, verifica-se que, pelo critério da estabilidade, o sistema é
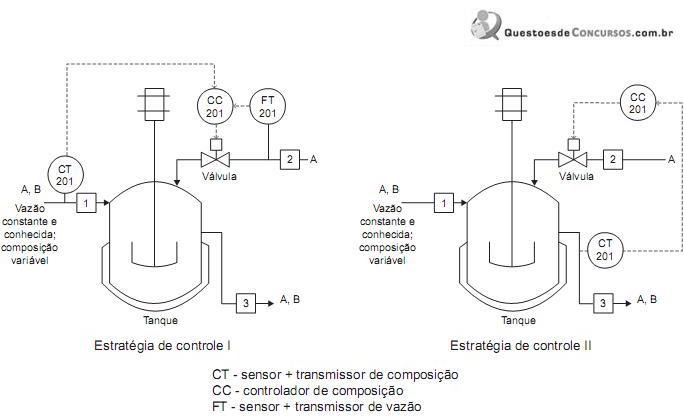
As estratégias de controle I e II apresentadas acima são tais que:
A classificação desse tipo de compensador e a respectiva justificativa estão adequadamente apresentadas em
Dentre os três componentes desse compensador, a parte integral tem como principal atribuição

 , que representa o modelo de um sistema linear a ser controlado. No domínio da frequência em que s = jω, para se calcular a margem de ganho em estabilidade, é necessário medir a frequência ωπ . Nessa frequência, a função G(jωπ) tem ângulo de fase igual a -180º.
, que representa o modelo de um sistema linear a ser controlado. No domínio da frequência em que s = jω, para se calcular a margem de ganho em estabilidade, é necessário medir a frequência ωπ . Nessa frequência, a função G(jωπ) tem ângulo de fase igual a -180º. Qual é o valor, em rad/s, dessa frequência ωπ?

Considerando-se que as duas frequências são definidas como:
 , qual é a expressão da função de transferência
, qual é a expressão da função de transferência  ?
? I. O sistema é estável se tiver qualquer polo na parte real positiva.
II. O sistema é estável se, quando sujeito a uma entrada impulso, a saída tende a zero à medida que o tempo tende ao infinito.
III. O sistema é criticamente estável se qualquer polo tiver a parte real nula.
Assinale - se

A função de transferência G(s) apresenta dois polos complexos: – i e + i.
O sistema representado pela função de transferência G(s) é de segunda ordem.
O sistema representado pela função G(s) é estável.
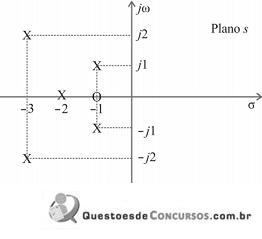
Se a figura abaixo representa o mapa de polos (identificados por ‘x’) e zeros (identificados por ‘0’) de uma função de transferência em malha fechada de um sistema dinâmico linear, então o sistema é estável e gera uma saída com amplitude não nula, em regime permanente, quando a entrada é uma função do tipo degrau.
Considerando que, em condições de contorno iniciais nulas, um sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações 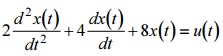 e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
No domínio da frequência, esse sistema apresenta dois polos
complexos conjugados e um único zero finito.
Considerando que, em condições de contorno iniciais nulas, um
sistema de controle linear contínuo seja representado, no domínio do tempo, pelas equações  e
e  , em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
, em que u(t) é um sinal de entrada, x(t) é uma variável do sistema e y(t) é a saída, julgue o item.
Considere a situação em que todas as variáveis do sistema
devam ser convertidas do modo contínuo para o discreto.
Nesse caso, a frequência mínima para amostragem do sinal
deverá ser superior a 0,40 Hz.
Julgue o item subsecutivo, a respeito da teoria de controle.
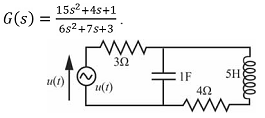
A função de transferência entre a corrente e a fonte de tensão do circuito mostrado na figura abaixo é dada por
Julgue o item subsecutivo, a respeito da teoria de controle.
A representação no espaço de estados de um modelo
matemático descrito por uma equação diferencial de ordem n
consiste em um sistema de n equações diferenciais de primeira
ordem.
Julgue o item subsecutivo, a respeito da teoria de controle.
Basta uma única variável de estado para descrever
completamente a dinâmica de um sistema linear de segunda
ordem.

A figura acima ilustra um circuito elétrico linear, em que o parâmetro K é constante e positivo, vI (t) é a tensão de entrada e vO(t) é a tensão de saída. A respeito desse circuito, julgue o item que se segue.
A impedância de entrada do circuito, vista pela fonte vI
(t), é
dada por  em que j 2 = -1 e ω é a frequência
expressa em rad/s.
em que j 2 = -1 e ω é a frequência
expressa em rad/s.
A figura acima ilustra um circuito elétrico linear, em que o parâmetro K é constante e positivo, vI (t) é a tensão de entrada e vO(t) é a tensão de saída. A respeito desse circuito, julgue o item que se segue.
Esse circuito corresponde a um filtro passa-baixas de primeira
ordem.