Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 607 questões
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458456
Engenharia Eletrônica
Texto associado
Uma abordagem moderna da teoria de controle representa sistemas dinâmicos em termos de variáveis de estados. Nessa representação, os sistemas dinâmicos são descritos por meio de um conjunto de equações diferenciais de primeira ordem acoplado a um conjunto de variáveis internas, chamadas de variáveis de estado. Um conjunto de equações algébricas relacionando as variáveis de estado às saídas físicas do sistema completa a descrição. Uma das representações possíveis por variáveis de estado para sistemas com polos diferentes, conhecida como forma canônica diagonal, é dada pelo seguinte conjunto de equações:

Um sistema dinâmico linear governado pela equação diferencial  cujas variáveis de estado são
cujas variáveis de estado são 
 , possui a equação de estados apresentada abaixo.
, possui a equação de estados apresentada abaixo.
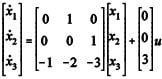
cujas variáveis de estado são , possui a equação de estados apresentada abaixo.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
SEGESP-AL
Prova:
CESPE - 2013 - SEGESP-AL - Perito Criminal - Engenharia |
Q458455
Engenharia Eletrônica
Texto associado
Uma abordagem moderna da teoria de controle representa sistemas dinâmicos em termos de variáveis de estados. Nessa representação, os sistemas dinâmicos são descritos por meio de um conjunto de equações diferenciais de primeira ordem acoplado a um conjunto de variáveis internas, chamadas de variáveis de estado. Um conjunto de equações algébricas relacionando as variáveis de estado às saídas físicas do sistema completa a descrição. Uma das representações possíveis por variáveis de estado para sistemas com polos diferentes, conhecida como forma canônica diagonal, é dada pelo seguinte conjunto de equações:
onde pi e ci representam, respectivamente, os polos do sistema e as amplitudes associadas aos polos. Nesse conjunto de equações, u denota a entrada do sistema e y é a saída correspondente. Com relação à descrição de sistemas dinâmicos lineares por variáveis de estado, julgue os itens a seguir.
A representação na forma canônica diagonal de um sistema com função de transferência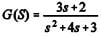 é dada por
é dada por
A representação na forma canônica diagonal de um sistema com função de transferência
é dada por
Ano: 2013
Banca:
FGV
Órgão:
TJ-AM
Prova:
FGV - 2013 - TJ-AM - Analista Judiciário - Engenharia Elétrica |
Q445246
Engenharia Eletrônica
Sistema é um fenômeno que se deseja operar com algum objetivo. Ele é representado por uma variável de entrada uma de saída. A relação entre elas é definida como sendo uma função de transferência. Pode-se dizer, a respeito de polos e zeros de uma função de transferência, que
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397818
Engenharia Eletrônica
Julgue o item a seguir, referente à análise de sistemas lineares contínuos no domínio da frequência.
O módulo da função de transferência G (S) = 1/ S + 2 para 2 rad/s é menor que 1/2.
O módulo da função de transferência G (S) = 1/ S + 2 para 2 rad/s é menor que 1/2.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397815
Engenharia Eletrônica
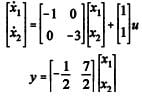
Considerando um sistema linear cuja função de transferência seja G(s) = s +1/ 4s2 + 5s + 6 , no domínio da frequência complexa s = jω em que suas saídas e entradas são nulas no instante t = 0, julgue o item subsequente.
O ganho DC da função de transferência G(s) é menor que 2.
O ganho DC da função de transferência G(s) é menor que 2.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397814
Engenharia Eletrônica
Considerando um sistema linear cuja função de transferência seja
G(s) = s +1/ 4s2 + 5s + 6 , no domínio da frequência complexa s = jω
em que suas saídas e entradas são nulas no instante t = 0, julgue o item subsequente.
O sistema representado por G(s) é controlável.
O sistema representado por G(s) é controlável.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397810
Engenharia Eletrônica
Com relação à teoria de controle de sistemas lineares contínuos e discretos no tempo, julgue o próximo item.
Um sistema cuja resposta ao impulso seja dada pela função h(t) = e-t sen(3t), em que t é uma variável temporal contínua, será instável em regime permanente.
Um sistema cuja resposta ao impulso seja dada pela função h(t) = e-t sen(3t), em que t é uma variável temporal contínua, será instável em regime permanente.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
STF
Prova:
CESPE - 2013 - STF - Analista Judiciário - Engenharia Elétrica |
Q397809
Engenharia Eletrônica
Com relação à teoria de controle de sistemas lineares contínuos e discretos no tempo, julgue o próximo item.
Na expansão em frações parciais da função de transferência Y (S) = - (S2 + S - 1)/ S (S + 1)(S + 2) o coeficiente da parcela do polo real igual a -1 será maior que 3.
Na expansão em frações parciais da função de transferência Y (S) = - (S2 + S - 1)/ S (S + 1)(S + 2) o coeficiente da parcela do polo real igual a -1 será maior que 3.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Analista de Planejamento - Engenharia Elétrica |
Q396193
Engenharia Eletrônica
Texto associado
Sabendo que a transformada de Laplace bilateral de X( t ) é definida por 
julgue os itens que se seguem.
julgue os itens que se seguem.
O diagrama de polos e zeros da função 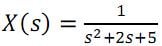 contém dois polos complexos conjugados iguais a -1 + j2 e -1 - j2, em que j =
contém dois polos complexos conjugados iguais a -1 + j2 e -1 - j2, em que j = 
contém dois polos complexos conjugados iguais a -1 + j2 e -1 - j2, em que j =
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Analista de Planejamento - Engenharia Elétrica |
Q396192
Engenharia Eletrônica
Texto associado
Sabendo que a transformada de Laplace bilateral de X( t ) é definida por
julgue os itens que se seguem.
julgue os itens que se seguem.
A transformada de Laplace da função x(t) = 3e-2t u (t), em que u(t) é a função degrau unitário, converge quando a parte real da variável S for maior que -2.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Analista de Planejamento - Engenharia Elétrica |
Q396188
Engenharia Eletrônica
Texto associado
Com base na teoria de controle, julgue o item a seguir.
Considerando que H( s ) e G( s ) são funções de transferência no domínio da transformada de Laplace, então a função de transferência  do sistema, presente na figura abaixo, é dada por
do sistema, presente na figura abaixo, é dada por 
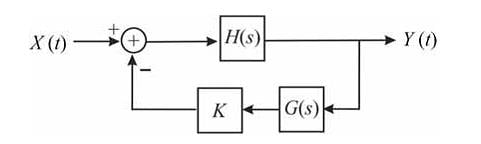
do sistema, presente na figura abaixo, é dada por
Ano: 2013
Banca:
BIO-RIO
Órgão:
ELETROBRAS
Prova:
BIO-RIO - 2013 - ELETROBRÁS - Profissional de Nível Superior - Engenharia Elétrica |
Q335481
Engenharia Eletrônica
A função de transferência de um sistema tem expressão  . Se a entrada para o sistema tem valor igual a 10 (constante), então a resposta forçada do sistema será
. Se a entrada para o sistema tem valor igual a 10 (constante), então a resposta forçada do sistema será
. Se a entrada para o sistema tem valor igual a 10 (constante), então a resposta forçada do sistema será
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
MS
Prova:
CESPE / CEBRASPE - 2013 - MS - Engenheiro Eletricista |
Q331318
Engenharia Eletrônica
Texto associado
Considerando o sistema linear discret o representado pela equação de diferenças y [n] = 3y [n-1] + 2x [n] - 4x [n-2], em que x [n] é o sinal de entrada e y [n] é o sinal de saída, julgue os itens subsequentes.
A função de transferência do referido sistema é  .
.
.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Pesquisador - Telecomunicações, Computação e Eletrônica |
Q314074
Engenharia Eletrônica
Texto associado
Um sistema de controle deve ser projetado e analisado quanto a sua resposta transitória e estacionária, como a garantia de entendimento completo do sistema. Julgue os itens que se
seguem acerca desse assunto.
seguem acerca desse assunto.
A estabilidade de um sistema linear de malha fechada é garantida, se todos os polos da função de transferência estiverem localizados no semiplano direito do plano S.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Pesquisador - Telecomunicações, Computação e Eletrônica |
Q314073
Engenharia Eletrônica
Texto associado
Um sistema de controle deve ser projetado e analisado quanto a sua resposta transitória e estacionária, como a garantia de entendimento completo do sistema. Julgue os itens que se
seguem acerca desse assunto.
seguem acerca desse assunto.
A redução da constante de tempo de um sistema pode ser obtida pela adição de uma malha de realimentação positiva, com o cuidado de não tornar o sistema instável.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Pesquisador - Telecomunicações, Computação e Eletrônica |
Q314072
Engenharia Eletrônica
Texto associado
Um sistema de controle deve ser projetado e analisado quanto a sua resposta transitória e estacionária, como a garantia de entendimento completo do sistema. Julgue os itens que se
seguem acerca desse assunto.
seguem acerca desse assunto.
Em uma resposta típica a um degrau, no caso de sistema de segunda ordem, pode haver a necessidade de minimizar simultaneamente o tempo de subida e o valor do sobre-sinal máximo, para garantir uma resposta suave do sistema.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Pesquisador - Telecomunicações, Computação e Eletrônica |
Q314070
Engenharia Eletrônica
Texto associado
A respeito de sistemas de controle, amplamente utilizados na pilotagem de avião, mísseis guiados, veículos espaciais e também como parte dos processos industriais e de fabricação, julgue os itens que se seguem.
Sistemas de controle de malha fechada são robustos e reduzem variações internas e distúrbios externos, portanto, são mais adequados nos casos em que é necessário produzir resultados imunes às variações de temperatura e nos valores reais dos componentes utilizados nos processos de fabricação pela indústria.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Pesquisador - Telecomunicações, Computação e Eletrônica |
Q314069
Engenharia Eletrônica
Texto associado
A respeito de sistemas de controle, amplamente utilizados na pilotagem de avião, mísseis guiados, veículos espaciais e também como parte dos processos industriais e de fabricação, julgue os itens que se seguem.
Sistemas de controle de malha aberta são de construção mais simples e mais fáceis de serem mantidos, se comparados aos sistemas de controle de malha fechada.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Pesquisador - Telecomunicações, Computação e Eletrônica |
Q314068
Engenharia Eletrônica
Texto associado
A respeito de sistemas de controle, amplamente utilizados na pilotagem de avião, mísseis guiados, veículos espaciais e também como parte dos processos industriais e de fabricação, julgue os itens que se seguem.
As características de um sistema de controle não são constantes, devido a várias razões, como deterioração de componentes ao longo do tempo ou variações em parâmetros e ambiente. Também pode ser necessário que a saída do sistema varie para realizar a compensação de alguns fatores externos, exigindo sua adaptação. Em todos esses casos, a utilização de um sistema de controle com realimentação é recomendado e suficiente para a correção dessas variações.
Ano: 2013
Banca:
CESPE / CEBRASPE
Órgão:
INPI
Prova:
CESPE - 2013 - INPI - Pesquisador - Telecomunicações, Computação e Eletrônica |
Q314067
Engenharia Eletrônica
Texto associado
A respeito de sistemas de controle, amplamente utilizados na pilotagem de avião, mísseis guiados, veículos espaciais e também como parte dos processos industriais e de fabricação, julgue os itens que se seguem.
Por produzir uma realimentação de parte da saída para a entrada do sistema, os sistemas de controle de malha fechada apresentam menos problemas de estabilidade que os de malha aberta.