Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 609 questões
 , em que K e a são parâmetros reais
positivos, assinale a opção que apresenta corretamente, em graus,
a fase do sistema quando este é excitado por um sinal senoidal de
alta frequência.
, em que K e a são parâmetros reais
positivos, assinale a opção que apresenta corretamente, em graus,
a fase do sistema quando este é excitado por um sinal senoidal de
alta frequência.
Um sistema que possui uma variável de entrada e uma de saída tem, como função de transferência, a relação entre essas variáveis.
A respeito de polos e zeros dessa função, assinale a afirmativa correta.
Sobre os polos e zeros, analise as assertivas abaixo.
I. Tanto os polos quanto os zeros podem ser reais, imaginários ou complexos.
II. Para que um sistema seja estável (causal), é necessário que o número de zeros seja igual ao número de polos.
III. Para que o sistema seja realizável, é necessário que os polos estejam localizados no semiplano esquerdo (SPE) do plano “s”.
É correto o que se afirma em
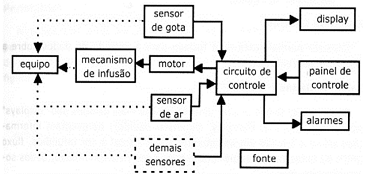
Qual equipamento está representado no seguinte diagrama em blocos?
 Qual é a representação no domínio da frequência dessa resposta e qual tipo de amortecimento ela apresenta, sabendo que s1 e s2 são reais e diferentes entre si?
Qual é a representação no domínio da frequência dessa resposta e qual tipo de amortecimento ela apresenta, sabendo que s1 e s2 são reais e diferentes entre si?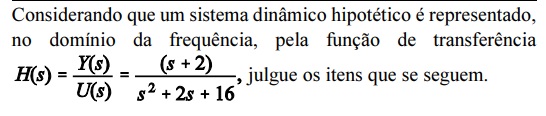
Considerando que um sistema dinâmico hipotético é representado, no domínio da frequência, pela função de transferência  julgue o item que se segue.
julgue o item que se segue.
Tomando-se a entrada do sistema por u(t), a saída por y(t) e os estados por x1(t) e x2(t), então uma possível representação desse sistema na forma de variáveis de estados é dada por:

julgue o item que se segue.
Caso o referido sistema seja excitado por um sinal de entrada na forma de degrau unitário, sua resposta em regime permanente no domínio do tempo será uma constante superior a 0,2.
A figura abaixo apresenta o diagrama em blocos de um sistema linear invariante no tempo composto pelos sistemas S1 (t) e S2 (t):
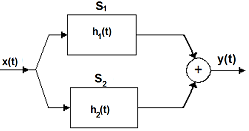
A função S(t) do diagrama equivalente apresentado abaixo e a
saída y(t) são, respectivamente, iguais a:

O estado de operação e falha de um equipamento elétrico
reparável é representado na forma de um modelo a dois estados de
Markov (diagrama de estado) conforme figura apresentada acima.
Nesse diagrama, λ e µ são a taxa de falhas e a taxa de reparos do
equipamento, respectivamente, ambos com valores constantes.
O tempo médio para falhas (MTTF) para esse equipamento foi
apurado como igual a 10 anos, e o tempo médio para reparo
(MTTR), igual à fração 1/365 anos.
A partir dessas informações, julgue o item que se segue.
O valor de λ é igual a 0,1 falha por ano.
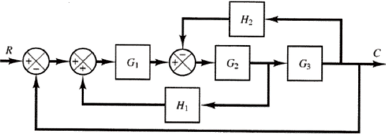
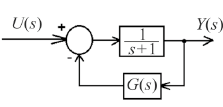
A função de transferência da malha de controle é:
Em um controlador proporcional-derivativo, a magnitude da saída do controlador é proporcional à taxa de variação do sinal de erro na entrada.

Considerando o sistema de controle ilustrado na figura apresentada,
em que C(s) representa um controlador, julgue o próximo item com referência à análise de estabilidade.