Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 601 questões
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Manutenção Júnior - Instrumentação-2012 |
Q431783
Engenharia Eletrônica
Um sistema de controle realimentado por um controlador PID apresenta um percentual de ultrapassagem (sobrepasso) de 40% para uma entrada do tipo degrau.
Qual mudança deve ser feita na sintonia desse controlador para reduzir o percentual de ultrapassagem?
Qual mudança deve ser feita na sintonia desse controlador para reduzir o percentual de ultrapassagem?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Manutenção Júnior - Instrumentação-2012 |
Q431781
Engenharia Eletrônica
Texto associado
A figura mostra um sistema de controle realimentado, no qual C é uma perturbação constante.

Qual controlador deve ser utilizado para eliminar o efeito da perturbação na resposta do sistema?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Manutenção Júnior - Instrumentação-2012 |
Q431779
Engenharia Eletrônica
Qual o valor da probabilidade de falha sob demanda de um sistema de controle com nível de integridade SIL igual a 3 e disponibilidade igual a 99,90%?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Manutenção Júnior - Instrumentação-2012 |
Q431770
Engenharia Eletrônica
Qual o grau aceitável de sucesso esperado para um sistema de controle com SIL nível 2 e disponibilidade desejada de 99,00%?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Elétrica-2012 |
Q431457
Engenharia Eletrônica
Texto associado
Considere as informações a seguir para responder a questão.

Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por: .
.
Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.
Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por:
.Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.
Com base na curva de amplitude, para que valor do ganho K esse diagrama foi traçado?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Elétrica-2012 |
Q431456
Engenharia Eletrônica
Texto associado
Considere as informações a seguir para responder a questão.
Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por: .
Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.
Leve em conta a planta de controle cujo modelo de malha aberta, em função de transferência no domínio de Laplace, é dado por:
.Para um certo valor do ganho K, foi traçado o esboço aproximado do diagrama de Bode, em amplitude e fase, da função G(s), representado na figura acima.
Analisando-se o diagrama de Bode para estabelecer a condição de estabilidade dessa planta em malha fechada com realimentação de saída, o sistema malha fechada será
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431353
Engenharia Eletrônica
Uma bomba de deslocamento positivo alimenta uma linha de óleo com vazão de 0,04 m3 /s. A linha alimenta as câmaras de avanço de dois atuadores lineares, cujas áreas de êmbolo são iguais e valem 0,005 m2 . Sendo a velocidade de avanço de um dos atuadores igual a 5 m/s, a do segundo atuador, em m/s, será de
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431332
Engenharia Eletrônica
Sabe-se que yss(k) = 2 é a resposta no estado estacionário de um sistema em tempo discreto para uma entrada do tipo degrau unitário. Então, uma possível função de transferência desse sistema é descrita por
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431330
Engenharia Eletrônica
Qual a função de transferência que corresponde a um sistema em tempo discreto assintoticamente estável?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431328
Engenharia Eletrônica
Um controlador de avanço de fase foi projetado em tempo contínuo, obtendo-se a seguinte função de transferência desse controlador:
D(s) = s + 1
0 .1s + 1
Esse controlador foi utilizado em um sistema de controle digital, com um período de amostragem T = 0.1s, e a regra retangular de avanço (regra de Euler) para calcular o equivalente em tempo discreto de D(s), obtendo-se
D(s) = s + 1
0 .1s + 1
Esse controlador foi utilizado em um sistema de controle digital, com um período de amostragem T = 0.1s, e a regra retangular de avanço (regra de Euler) para calcular o equivalente em tempo discreto de D(s), obtendo-se
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431326
Engenharia Eletrônica

Qual o ganho de realimentação de estados K para que o sistema em malha fechada tenha polos em -1, -2 e -3 ?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431325
Engenharia Eletrônica

Considerando G(s) um duplo integrador, o sistema em malha fechada será
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431323
Engenharia Eletrônica
Texto associado
Um sistema com função de transferência G(s) = s + 2 apresenta o diagrama de
(s -1 ) ( s2 + 10s + 26 )

(s -1 ) ( s2 + 10s + 26 )
Então, conclui-se que o sistema em malha fechada é assintoticamente estável para todo
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Engenheiro de Equipamento Júnior - Eletrônica-2012 |
Q431322
Engenharia Eletrônica
Sabe-se que qualquer sistema linear e invariante no tem-po pode ser descrito pela sua equação de estados
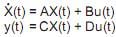
Então, para quais valores das matrizes A e B o sistema NÃO poderá ser estabilizado utilizando um controlador por realimentação de estados?
Então, para quais valores das matrizes A e B o sistema NÃO poderá ser estabilizado utilizando um controlador por realimentação de estados?
Ano: 2012
Banca:
CESGRANRIO
Órgão:
Petrobras
Prova:
CESGRANRIO - 2012 - Petrobras - Técnico de Projetos, Construção e Montagem Júnior - Eletrônica-2012 |
Q430251
Engenharia Eletrônica
Considere a figura do diagrama de blocos de um sistema de controle do tipo proporcional.
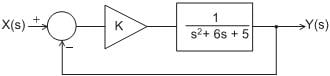
O valor limite do ganho K, acima do qual a função de transferência não apresentará polos reais, é
não apresentará polos reais, é
O valor limite do ganho K, acima do qual a função de transferência
não apresentará polos reais, é
Ano: 2014
Banca:
FGV
Órgão:
DPE-RJ
Prova:
FGV - 2014 - DPE-RJ - Técnico Superior Especializado - Engenharia Elétrica |
Q422736
Engenharia Eletrônica
Considere as seguintes afirmativas a respeito de estabilidade de sistemas:
I. O sistema é estável se tiver qualquer polo na parte real positiva.
II. O sistema é estável se, quando sujeito a uma entrada impulso, a saída tende a zero à medida que o tempo tende ao infinito.
III. O sistema é criticamente estável se qualquer polo tiver a parte real nula.
Assinale - se
I. O sistema é estável se tiver qualquer polo na parte real positiva.
II. O sistema é estável se, quando sujeito a uma entrada impulso, a saída tende a zero à medida que o tempo tende ao infinito.
III. O sistema é criticamente estável se qualquer polo tiver a parte real nula.
Assinale - se
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
TJ-SE
Prova:
CESPE - 2014 - TJ-SE - Analista Judiciário - Engenharia Elétrica |
Q405642
Engenharia Eletrônica

No diagrama de blocos mostrado na figura acima, em que G1(s) = s+1, G2(s) = s2 , G3(s) = s, a entrada U(s) é nula no instante inicial. Julgue os próximos itens, a respeito da função de transferência G(s) = Y(s)/U(s).
A função de transferência G(s) apresenta dois polos complexos: – i e + i.
A função de transferência G(s) apresenta dois polos complexos: – i e + i.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
TJ-SE
Prova:
CESPE - 2014 - TJ-SE - Analista Judiciário - Engenharia Elétrica |
Q405641
Engenharia Eletrônica
No diagrama de blocos mostrado na figura acima, em que G1(s) = s+1, G2(s) = s2 , G3(s) = s, a entrada U(s) é nula no instante inicial. Julgue os próximos itens, a respeito da função de transferência G(s) = Y(s)/U(s).
O sistema representado pela função de transferência G(s) é de segunda ordem.
O sistema representado pela função de transferência G(s) é de segunda ordem.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
TJ-SE
Prova:
CESPE - 2014 - TJ-SE - Analista Judiciário - Engenharia Elétrica |
Q405640
Engenharia Eletrônica
No diagrama de blocos mostrado na figura acima, em que G1(s) = s+1, G2(s) = s2 , G3(s) = s, a entrada U(s) é nula no instante inicial. Julgue os próximos itens, a respeito da função de transferência G(s) = Y(s)/U(s).
O sistema representado pela função G(s) é estável.
O sistema representado pela função G(s) é estável.
Ano: 2014
Banca:
CESPE / CEBRASPE
Órgão:
Polícia Federal
Prova:
CESPE - 2014 - Polícia Federal - Engenheiro Eletricista |
Q404915
Engenharia Eletrônica
Com relação aos conceitos de teoria de controle e técnicas de processamento de sinais, julgue os próximos itens.
Se a figura abaixo representa o mapa de polos (identificados por ‘x’) e zeros (identificados por ‘0’) de uma função de transferência em malha fechada de um sistema dinâmico linear, então o sistema é estável e gera uma saída com amplitude não nula, em regime permanente, quando a entrada é uma função do tipo degrau.
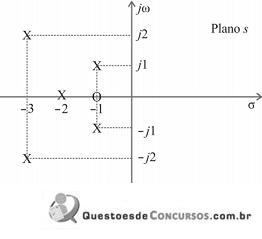
Se a figura abaixo representa o mapa de polos (identificados por ‘x’) e zeros (identificados por ‘0’) de uma função de transferência em malha fechada de um sistema dinâmico linear, então o sistema é estável e gera uma saída com amplitude não nula, em regime permanente, quando a entrada é uma função do tipo degrau.