Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 607 questões
digitalizados — ou seja, convertido em sinais digitais — para que
possam ser processados em um computador ou microprocessador
A respeito de conceitos referentes à digitalização de sinais e a
sistemas de processamento digital de sinais, julgue os próximos
itens.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
 em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada.
em que A, B e C são constantes reais positivas. Se a esse sistema for adicionado um controle de ação proporcional com ganho positivo e uma realimentação negativa, será possível que a sua função de transferência, em malha fechada, tenha polos no semiplano direito do plano complexo s e, portanto, será possível que o sistema se torne instável em malha fechada. utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
utilizados como controladores de processos dinâmicos. Eles
propiciam ajustes no comportamento dos sistemas dinâmicos, tanto
na sua resposta transitória quanto na de regime permanente, para
certos tipos de entrada de referência. A respeito de características
desses controladores, quando ligados em série com o processo a ser
controlado, julgue os itens que se seguem.
conectados ou relacionados de maneira a comandar, dirigir ou
regular a si mesmo ou a outros sistemas. Os sistemas de controle
podem ser classificados, de forma geral, em sistemas de malha
aberta e de malha fechada e sistemas digitais e analógicos. Com
relação a esse assunto, julgue os itens subsequentes.
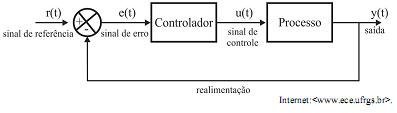

O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
O uso do termopar como sensor de temperatura tornaria o condicionador de sinal desnecessário.
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
Quando o sensor de temperatura termorresistivo é um RTD (resistive temperature detector) de platina, a calibração do sistema não se faz necessária.
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
Caso a planta esteja localizada em um ambiente industrial susceptível a ruído elétrico, um controlador do tipo PID poderia tornar-se
instável devido ao termo derivativo.
O controle de temperatura é muito aplicado no setor industrial e civil. A figura acima mostra, de modo simplificado, o diagrama de um controlador de temperatura. Com base nesse diagrama, julgue o item a seguir.
O sinal de erro em regime permanente pode ser reduzido a zero, caso o controle de temperatura da planta seja realizado por um controlador do tipo proporcional (controlador P).
O uso de controlador PID é adequado para eliminar erros de regime permanente (ação derivativa), antecipar o comportamento do processo (ação integral) e reagir ao erro presente, conferindo ao sistema de controle uma reação rápida à ação de perturbações ou variações de referência de magnitudes significativas (ação proporcional).
Em um sistema de automação predial, o controlador é caracterizado por ser um equipamento eletrônico com diversas interfaces elétricas, ou seja, módulos de entrada e de saída. Acerca de características genéricas desse equipamento, julgue o item subsequente.
Válvulas acionadas mecanicamente por solenoides são,
normalmente, acionadas eletricamente por interfaces de saída
digital do controlador.
Em um sistema de automação predial, o controlador é caracterizado por ser um equipamento eletrônico com diversas interfaces elétricas, ou seja, módulos de entrada e de saída. Acerca de características genéricas desse equipamento, julgue o item subsequente.
Entradas analógicas são embasadas em dispositivos de
chaveamento do tipo TRIAC, sempre que o sinal elétrico de
excitação for do tipo corrente contínua.
Em um sistema de automação predial, o controlador é caracterizado por ser um equipamento eletrônico com diversas interfaces elétricas, ou seja, módulos de entrada e de saída. Acerca de características genéricas desse equipamento, julgue o item subsequente.
Se, em uma interface de entrada, existir a especificação de
corrente na faixa de 4 mA a 20 mA, é correto inferir que essa
interface aceita um sinal de entrada analógico.
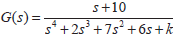 , na qual
, na qual  .
.Assinale a alternativa que determine qual(is) valor(es) de k a função de transferência G(s) tem os pólos alocados no semi-plano da esquerda.
Dados:
Assinale a alternativa correta.
Um sistema linear é modelado pelas seguintes equações

em que as constantes  e as variáveis físicas
e as variáveis físicas  .
.
A entrada do sistema é u(t) e a saída medida é y(t).
 desse sistema é:
desse sistema é:
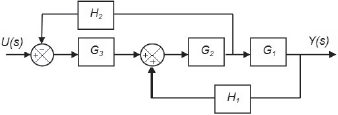
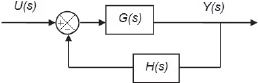
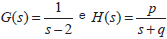
Considerando a entrada (U(s)) e a saída (Y(s)), a função transferência resultante equivalente a estrutura dos blocos da figura é: