Questões de Concurso
Sobre sistemas de controle em engenharia eletrônica
Foram encontradas 601 questões
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180134
Engenharia Eletrônica

O diagrama em bloco da figura acima é a representação de um sistema linear, com entrada X(s) e saída Y(s), modelado no domínio de Laplace. A expressão de Y(s) é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180132
Engenharia Eletrônica
O polinômio do denominador da função de transferência de um sistema em malha fechada é dado por
s³ + 12 s² + 44 s + 48 + K.
Variando positivamente o valor de K até o sistema entrar em oscilação pura (limiar da instabilidade), o valor da frequência de oscilação, em rad/s, é
Ano: 2011
Banca:
CESGRANRIO
Órgão:
Transpetro
Prova:
CESGRANRIO - 2011 - Transpetro - Engenheiro Júnior - Elétrica |
Q180125
Engenharia Eletrônica

O circuito da figura acima é composto por um amplificador operacional considerado ideal. Para que a função de transferência desse circuito seja
 , os valores de R, em O, e C, em F, devem ser, respectivamente
, os valores de R, em O, e C, em F, devem ser, respectivamente
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
SEPLAG-DF
Prova:
CESPE - 2008 - SEPLAG-DF - Professor - Eletrônica |
Q161843
Engenharia Eletrônica

Considerando que na descrição acima K é uma constante e s é o operador da transformada de Laplace, julgue os itens que se seguem.
A função de transferência que relaciona a posição angular C(s) e a entrada R(s) é dada por
10
(1+2k)s + 0,05
A função de transferência que relaciona a posição angular C(s) e a entrada R(s) é dada por
10
(1+2k)s + 0,05
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
SEPLAG-DF
Prova:
CESPE - 2008 - SEPLAG-DF - Professor - Eletrônica |
Q161842
Engenharia Eletrônica
Considerando que na descrição acima K é uma constante e s é o operador da transformada de Laplace, julgue os itens que se seguem.
Para K>0, o ramo do potenciômetro para controle da posição angular C(s) forma uma malha de realimentação negativa no sistema.
Para K>0, o ramo do potenciômetro para controle da posição angular C(s) forma uma malha de realimentação negativa no sistema.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153930
Engenharia Eletrônica
Texto associado

Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Esse sistema pode ser representado no espaço de estados, onde a matriz do sistema terá ordem 2 × 2.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153929
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
No diagrama de pólos e zeros desse sistema, observa-se que o zero está à direita do par de pólos complexos conjugados, no plano complexo.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153928
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
O comportamento desse sistema pode ser representado por uma equação diferencial ordinária de segunda ordem.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153927
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Componentes com freqüências muito altas, presentes na entrada, tenderão a ser atenuadas pelo sistema, quando observadas na saída.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153926
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Esse sistema possui ganho estático (ganho DC) igual a 10.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153925
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Esse sistema é estável.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153924
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Se esse sistema for excitado por um sinal senoidal com freqüência bem maior que 20 Hz, o sinal senoidal de saída, em regime permanente, estará com uma defasagem em relação à entrada de aproximadamente -180°.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153923
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Os pólos desse sistema são complexos conjugados e possuem parte real dada por -7 rad/seg.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153922
Engenharia Eletrônica
Texto associado
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Com referência ao sistema dinâmico caracterizado pela função de
transferência G(s) mostrada acima, julgue os itens de 101 a 109.
Esse sistema é de segunda ordem e possui um zero em -50 rad/s.
Ano: 2008
Banca:
CESPE / CEBRASPE
Órgão:
HEMOBRÁS
Prova:
CESPE - 2008 - HEMOBRÁS - Especialista em Produção de Hemoderivados - Engenheiro Eletrônico |
Q153906
Engenharia Eletrônica
Texto associado

Com relação ao circuito elétrico ilustrado acima, julgue os itens
de 81 a 85.
Com relação ao circuito elétrico ilustrado acima, julgue os itens
de 81 a 85.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
Correios
Prova:
CESPE - 2011 - Correios - Analista de Correios - Engenheiro - Engenharia Eletrônica |
Q132655
Engenharia Eletrônica
Texto associado

Julgue os itens que se seguem, referentes ao circuito elétrico
apresentado na figura acima, em que a entrada, é uma tensão
é uma tensão
senoidal com frequência angular ω.
Julgue os itens que se seguem, referentes ao circuito elétrico
apresentado na figura acima, em que a entrada,
é uma tensãosenoidal com frequência angular ω.
A função de transferência  é a de um filtro passa-baixas.
é a de um filtro passa-baixas.
é a de um filtro passa-baixas.
Ano: 2011
Banca:
CESPE / CEBRASPE
Órgão:
Correios
Prova:
CESPE - 2011 - Correios - Analista de Correios - Engenheiro - Engenharia Eletrônica |
Q132654
Engenharia Eletrônica
Texto associado
Julgue os itens que se seguem, referentes ao circuito elétrico
apresentado na figura acima, em que a entrada, é uma tensão
senoidal com frequência angular ω.
Julgue os itens que se seguem, referentes ao circuito elétrico
apresentado na figura acima, em que a entrada,
é uma tensãosenoidal com frequência angular ω.
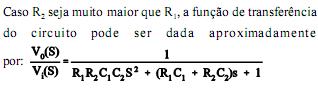
No domínio da transformada de Laplace, a função de transferência 
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112748
Engenharia Eletrônica

Na situação acima, para que o sistema em malha fechada seja estável e sobreamortecido, o valor de k1 deve ser
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112745
Engenharia Eletrônica
Um sistema dinâmico linear, causal e invariante no tempo, é modelado pela função de transferência G (s) =  , no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganho
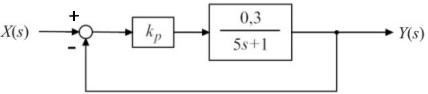
Considerando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
, no SI. Deseja-se implementar um controlador proporcional para esse sistema, segundo o diagrama de blocos mostrado abaixo, em que X(s) e Y(s) representam a transformada de Laplace da entrada e da saída do sistema em malha fechada, respectivamente, e kp é o ganhoConsiderando essas informações, assinale a opção que apresenta o valor do ganho kp de forma que a constante de tempo em malha fechada, no diagrama mostrado, seja de meio segundo.
Ano: 2010
Banca:
CESPE / CEBRASPE
Órgão:
INMETRO
Prova:
CESPE - 2010 - INMETRO - Pesquisador - Engenharia Eletrônica |
Q112711
Engenharia Eletrônica

Considerando o circuito acima, caso os sinais ei(t) e e0(t) sejam representados, no domínio da transformada de Laplace, por Et(s) e E0(s) respectivamente, então a expressão H(s) =  é igual a
é igual a
é igual a